Обзор робота-пылесоса Redroad R10 со станцией самоочистки

- Цена: 19819 руб. по REDROADR10
- Перейти в магазин
Робот-пылесос Redroad R10 делает только сухую уборку, но делает это хорошо. Есть тряпка, с помощью которой заявлена влажная уборка, но для «бывалых» понятно по определению, что это только «протирка», не более. За особыми маркетинговыми словами не гнался. Как всегда, я оцениваю мощность всасывания. С заявленными 4000 Па моя оценочная мощность всасывания получилась сравнимой с моделями роботов-пылесосов с 6000-6500 Па.
Описание
Робот-пылесос
Модель робота-пылесоса Redroad находится в большой коробке.
На боках у нее указаны основные технические характеристики. Разряжение робота — 4000 Па, станции — 21000 Па.
В комплект поставки входит: робот, зарядный блок, станция, пылесборник, совмещённый контейнер для воды и мусора, щётка очистки, инструкция, 1 шт. дополнительной боковой щетки.
С оборотной стороны есть отверстие, через которое происходит всасывание пыли при уборке. Также видны контакты зарядки. Датчики контроля перепадов высоты — с правого и левого краев и посередине, возле колеса впереди. В роли датчика ковра выступают данные три сенсора. Под крышкой находится батарея. В инструкции сказано, что ресурс батареи — 12-24 месяца, щетки — 12 месяцев, фильтра — 6 месяцев.

У робота три боковых сенсора расположены симметрично нижним, с краев и в центре на корпусе. Короб для сбора пыли совмещён с баком для воды. Ёмкость каждого соответственно 350 и 300 мл. Подача воды — электронная. Три режима, а режимов всасывания — четыре.

На анимации показал, что в передней части корпус робота-пылесоса имеет небольшой ход. Это помогает смягчать столкновения с деликатными поверхностями.
Фильтрация у Redroad G10 состоит из трёх фильтров: сетка, НЕРА и поролоновая прокладка. Обычно все заканчивается на HEPA-фильтре, но у обозреваемого немного больше.

Контейнер для мусора вынимается с нижней задней части робота-пылесоса.

Тряпка для протирки фиксируется на задней стенке. Её можно предварительно смачивать для пущего удовлетворения влажной уборкой, но это просто протирка, чтобы не писали и не говорили в других обзорах.

На следующей анимации показал, что лоток с тряпкой прижимается корпусом G10, когда он убирается. Это создаёт впечатление, что проходит настоящая уборка. В более дорогих моделях есть указание, с какой силой тряпка давит при влажной уборке. В обозреваемой этого нет, что ещё раз говорит о малой эффективности такой влажной уборки.

На следующем коллаже показал все основные элементы уборки. Это боковая щётка, валик и колеса робота-пылесоса.

Станция самоочистки
Станция самоочистки небольшого размера. Показал ее со всех сторон. Заявленная модность — 1 кВт. На надписи под крышкой дано объяснение индикаторам. Если горит голубой, станция готова к работе, если красный, то мешок для мусора не обнаружен, и если мигает красный, то у станции R10 обнаружен лишний предмет в месте всасывания. Индикатор находится немного выше контактов, как показано на четвертой фотографии ниже.
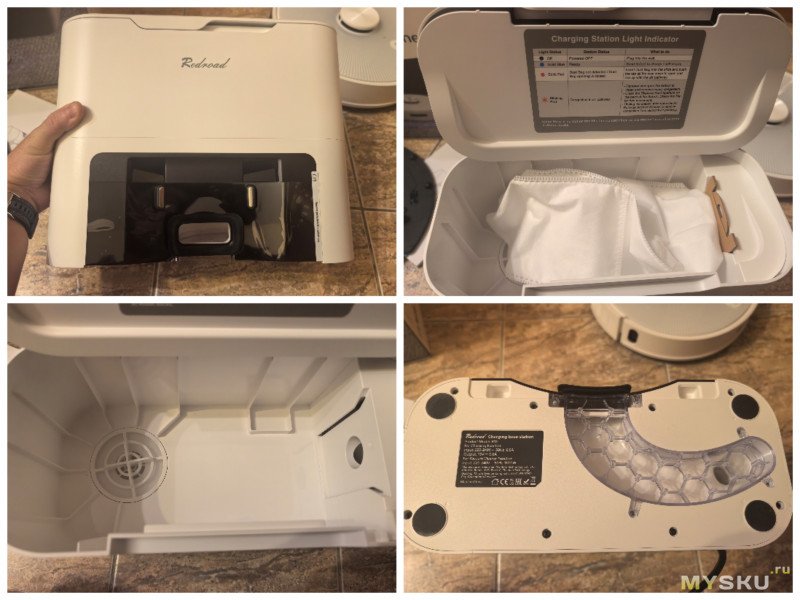
Мешок для сбора пыли лежит в станции самоочистки. На нем есть удобный клапан для смены, чтобы внутренняя грязь не высыпалась, когда его надо будет заменить.

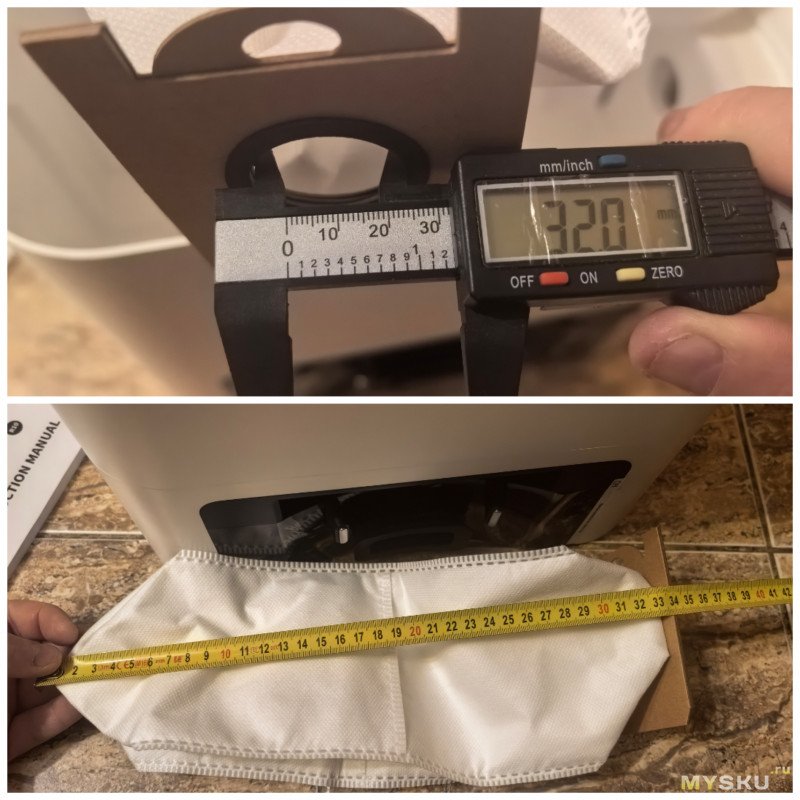
Отдельно привел для желающих и для себя размеры мешка сбора пыли в станции самоочистки. Все равно придется покупать дополнительный, следующий мешок. Не обязательно искать для R10, как пока думаю. Поэтому буду искать варианты с диаметром 32 мм и длиной 330 мм. Объем мешка — 4 л. Должно хватить на месяц точно.
Робот-пылесос Redroad R10 со станцией самоочистки готов к работе. Показал всю конструкцию на фотографии ниже. Она выглядит негромоздкой. Много места не занимает.

Заряд и разряд
Время работы от аккумулятора проверял для себя через уборку квартиры на разных режимах. Для меня было интересно, отличается ли от мощность всасывания в каждом режиме или оно просто для галочки. Понять это можно было по расходу заряда на уборку одной и той же площади. В каждом из четырех доступных режимов уборки время было одинаковым, но тратилось разное количество процентов заряда. Свел всю информацию в таблицу. В минимальном режиме всасывания будет расходоваться меньше всего энергии, поэтому максимальную автономность оценили по нему, минимальную — наоборот. Получилось, что на одном заряде (от 100 до 20 %) при минимальном режиме всасывания Redroad может убрать 113 м² за 102 мин. В максимальном режиме — 44 м² и 54 мин.

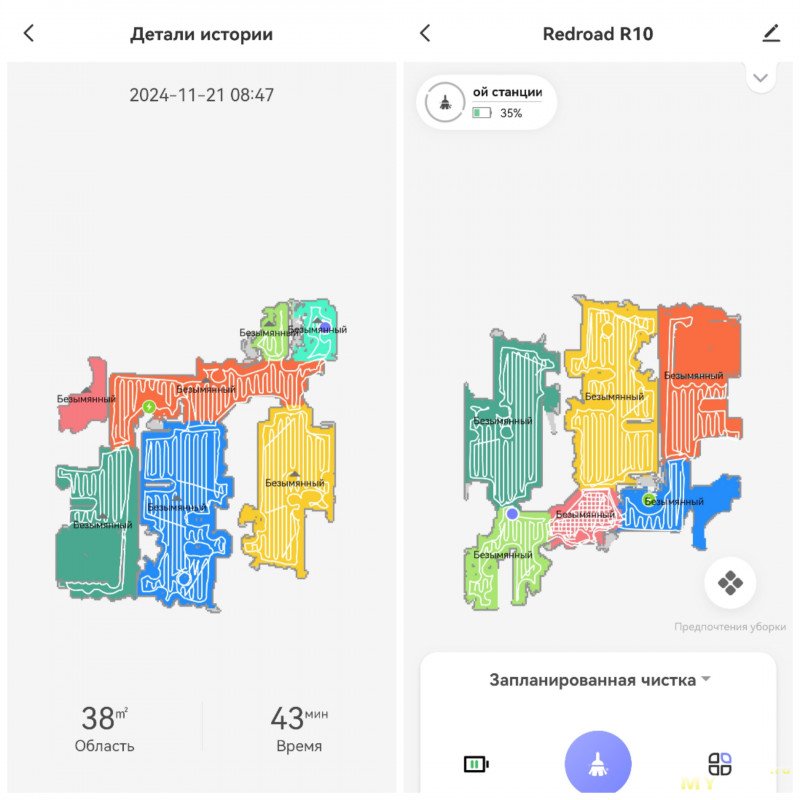
На скриншотах показал разницу между уборкой на минимальной режиме и максимальном. Во втором случае видно, что робот какие-то области проходит дважды, но не все. Полного заряда, а точнее со 100 до 20 %, хватает на 37 м². При достижении остаточной ёмкости аккумулятора в 20%, Redroad R10 едет на базу для дозарядки, параллельно освобождаясь от мусора. После дозарядки уборка продолжается. Если площадь уборки будет больше 40 м² (к примеру 80 м²) и ее надо проводить на максимальном режиме, то весь процесс займет более 6 часов, учитывая 4 часа на дозарядки (и 100 минут уборки на 80 м²).
Технические характеристики:
- Тип уборки: сухая и влажная
- Тип валика: силиконовый с лепестками и ворсом
- Влажная уборка: автоматическая подача воды на тряпку
- Сила разряжения станции (номинальная): 21000 Па
- Сила разрежения робота-пылесоса (номинальная): 4000 Па
- Сила разрежения (оценочная): от 110 до 530 Па
- Поток воздуха: от 10 до 28 м/с
- Мощность всасывания: от 5 до 74 Вт
- Шум: от 60 до 72 дБ
- Навигация: лидар (карты, запретные и зоны)
- Основная щётка: Трехлучевая лепестковая
- Ёмкость контейнера для мусора: 350 мл
- Бак для воды: 300 мл
- Ёмкость мешка в станции: 4 л
- Датчик ковра: Да
- Датчик перепада уровня: Да
- Преодоление порогов в 2 см: Да
- Защита от детей: Нет
- Фильтр: сменный НЕРА-фильтр
- Сетчатый фильт: Да
- Поролон около фильтра: Да
- Аккумулятор: 3200mAh
- Время работы: до 113 мин
- Площадь уборки: до 102 м²
- Время заряда: 240 мин
- Связь: Wi-Fi 2,4 ГГц
- Размеры: 330х330х94 мм
- Поддержка голосовых ассистентов: Google-ассистент
Приложение
Робот пылесос работает через приложение Smart Life. В этом же приложении работал и Abir X8. Настройки обеих моделей практически идентичные, за исключением, что в обозреваемом есть датчик ковра и поэтому есть опция включения увеличения мощности всасывания на нем. В Abir X8 такого не хватало, но немного компенсировалось большим разряжением, 6400 против 4000 Па у R10.
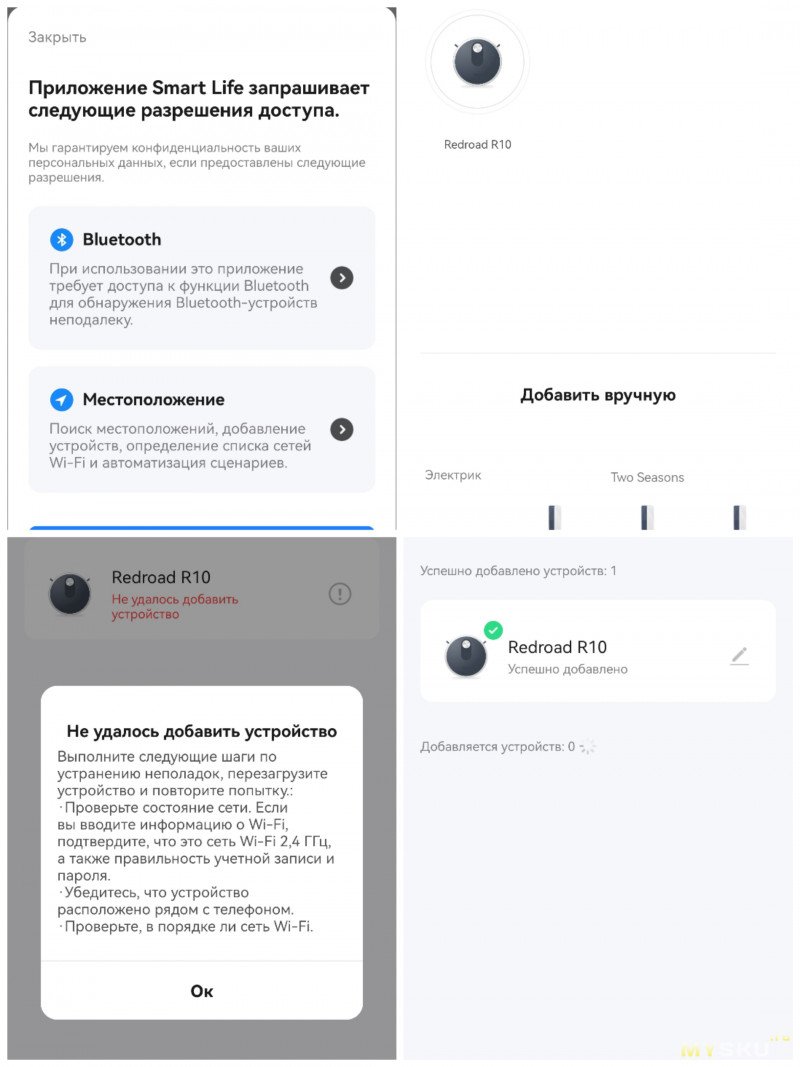
Для успешного сопряжения робота-пылесоса с приложением, надо дать соответствующие разрешения и использовать Wi-Fi 2,4ГГц. Также надо располагать сам пылесос около роутера. Мне это помогло. Пока устройства были не рядом, процесс соединения был неудачным.
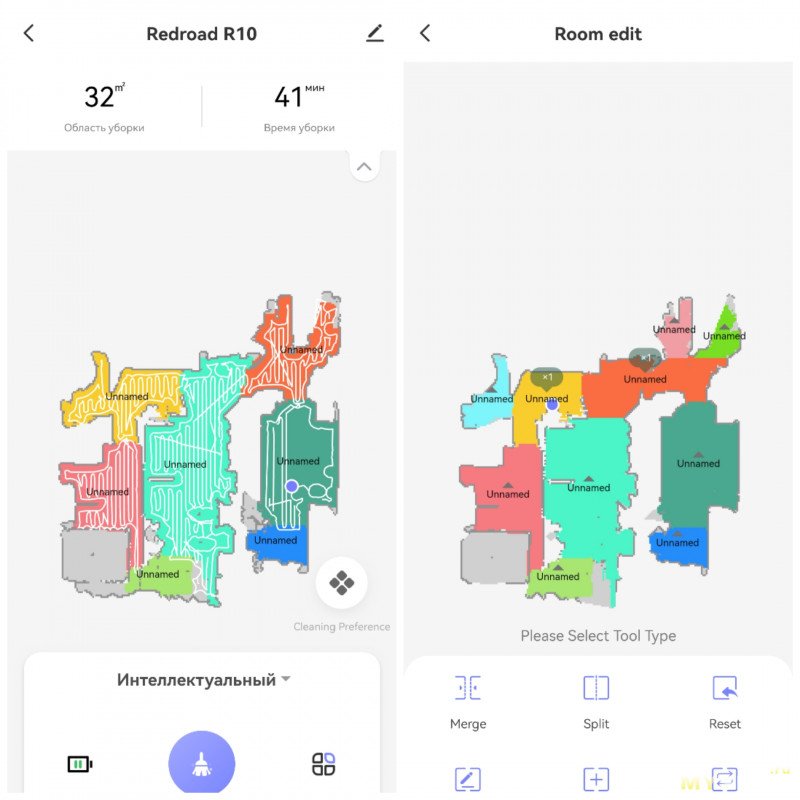
Первую настройку, разбивку карты уборки на зоны провел с версией ПО из комплекта. После прилетело обновление, карту случайно удалил и уже новая была красивее, с ровными линиями стен. Также меню изменилось с английского на русский.
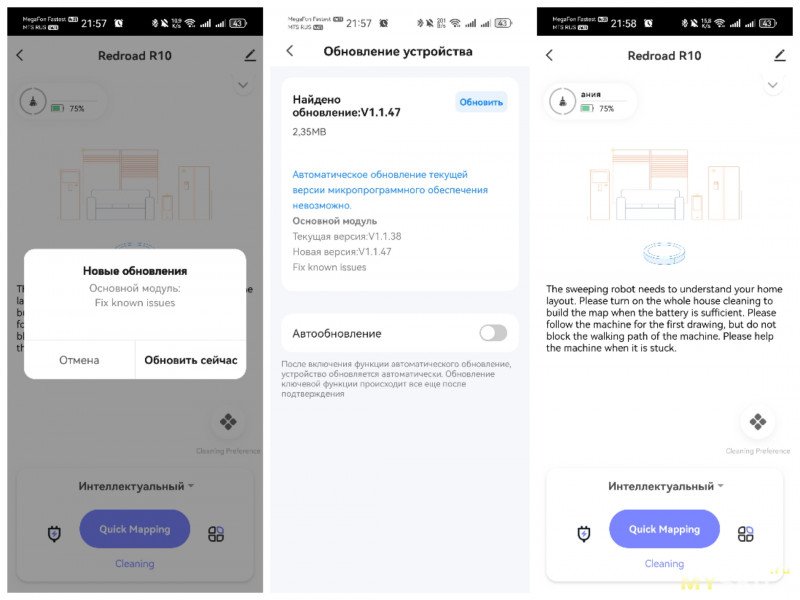
Ниже привел рисунки карты уборки до и после обновления. Зонирование комнат и областей в приложении проходит без проблем. У меня были небольшие трудности отделения зоны с Abir X8, но в точности утверждать, что это была проблема робота, а не приложения на тот момент не буду. С Redroad R10 никаких проблем не было.
Меню простое, но в нем есть все то же самое, что и в топовых роботах пылесосах, как у меня было в случае Dreame Bot X10 Pro. В Redroad R10 интерфейс проще, но от этого он сложнее не стал. Есть четыре режима всасывания и три режима подачи воды на тряпку. Дополнительно в сухой и влажных уборках есть вариант «Закрыть», но за «Режим уборки» я его не считаю. Получается, робот-пылесос может просто кататься по комнате, имитируя работу (как прям человека занимающийся нелюбимым делом).
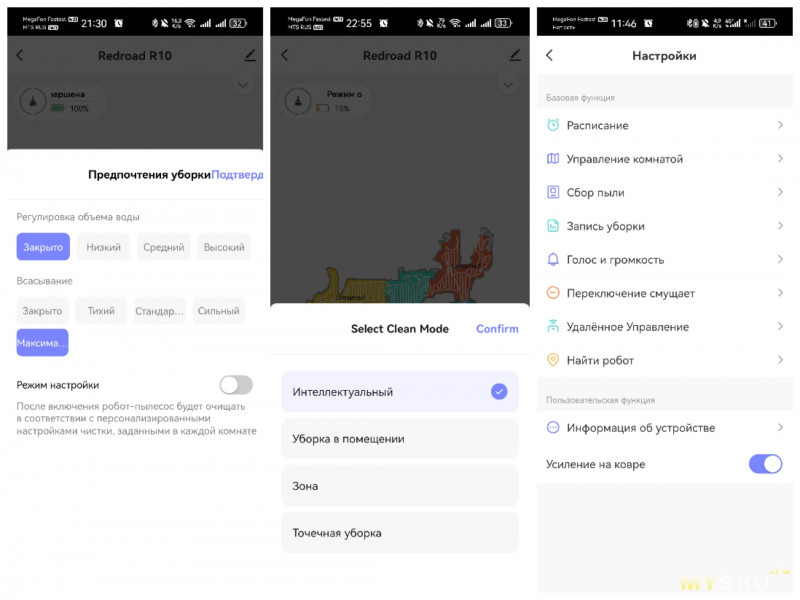
В дополнительных настройках можно автоматизировать процесс уборки, задать время прерывания процесса, если аккумулятор разрядился к ночи, управлять пылесосом в ручном режиме, назначать количество всасывания мусора на станции. Логичным выглядит вариант по всасыванию мусора из робота каждый раз, как он приезжает на станцию, или для дозарядки, или для зарядки. Ёмкость контейнера небольшая — 350 мл, но даже если там будет мусор, то эффективное всасывание будет меньше. Чем меньше мусора в контейнере, тем мощнее всасывает пылесос мусор и грязь.
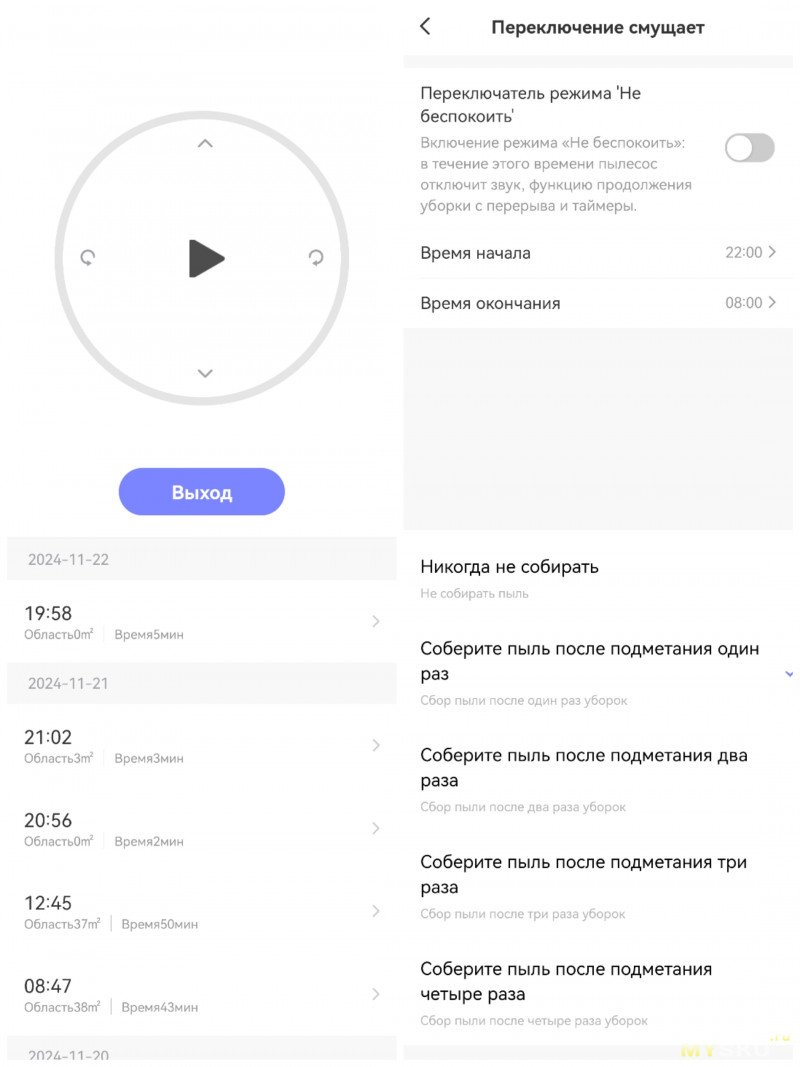
Из других настроек есть вариант выбора голоса. Языков много, есть русский английский. Можно настроить громкость оповещений. Я выставил ее в нулевое значение. Комментировать процесс уборки мне не надо. Главная опция для меня — это автоматизация: подключил робота, построил карту посещения, создал план уборки и все. В данном случае влажную уборку я не рассматриваю, так как эффективность ее не очень большая, поэтому мне нужна была простая модель для уборки мусора и чтобы я к роботу не подходил часто. Сейчас меня такой вариант устраивает, Redroad R10 убирается, когда я назначил, а после вся грязь всасывается на станции в мешок. Мне остаётся только проверять контейнеры на станции и в пылесосе на заполненность мусором.
Уборка
Робот может преодолевать препятствия в 2 см. В квартире есть несколько таких «возможностей». Ножки сушилки с наконечниками для него — непреодолимое препятствие, так как диаметр больше 2 см. Остальные «высокие места» он преодолевает, даже заезжает на умные весы в 1,5 см и спокойно с них съезжает.

Другие проблемные зоны для роботов-пылесосов — это черные ковры и ковры с большим ворсом. Я включил уборку удаленно и забыл ограничить зону в ванной, где лежал ковер с большим ворсом (см. вторую фотографию). Во время середины уборки и увидев, что робот уже на ковре, думал, сейчас будет ошибка. К удивлению, ошибки не было. Мне повезло, что работал режим «Минимальный». После проверил убраться, отправив Redroad R10 именно в ванную в рамках «Зональной уборки» на максимальном режиме всасывания. В таком режиме высокий ворс запутывался на боковой щётке и на валике.

Роботы-пылесосы с выступающим лидаром чаще не могут убираться под кроватью. Redroad R10 не исключение. В таких местах я промываю и чищу шваброй и вертикальным пылесосом.

В остальном «узких мест» с обозреваемым роботом-пылесосом у меня не было. В прихожей лежит черный ковер, который им убирается без каких-либо проблем. Также в комнате под столом, в области между тумбой и ножками, Roborock S8 (обзор здесь) немного «тупил» в первые уборки, поэтому ожидал повторения этого же и в случае Redroad R10. Специально запускал уборки удаленно, чтобы прийти и сказать, поняв ошибку, «я так и думал», но этого не было. Также и около зеркал, процесс проходил без проблем. Для лидара зеркала — препятствие и он может думать, что дальше есть площадь уборки. Наверное, алгоритмы уже научились справляться с такими местами, как замкнутое пространство, черный ковер, зеркала. Как минимум, у Redroad R10 проблем не было с уборкой, ни в плане самого процесса, ни в плане построения, выделения или зонирования помещений. Обозреваемые неплохо справляется у меня и около штор, и в замкнутых пространствах, как на четвертой и пятой фотографиях ниже. Он выезжает из таких ограничений без ошибок, продолжает уборку.

У модели есть влажная уборка, а точнее три режима такой уборки. Я про нее не хочу рассказывать я так как это банальная протирка. Как показал в начале обзора на анимации, что корпус модели давит на тряпку, как бы содействуя процессу мытья, но это все равно ни о чем. В топовых моделях роботов-пылесосов производитель указывает в характеристиках, что тряпки давят на пол с силой 12N, как в случае Roidme Eva (обзор здесь). Это звучит необычно, но, на самом означает, что сила давления на пол 1,22 килограм-сила. У Redroad R10 этого нет, как нет и возможности точно распознать препятствие, обойти его, зная, что обходит, поэтому для хорошего результата уборки надо приготавливать площадь, убирать лишнее с пола. Лидар R10 «видит» препятствия, но его не хватает, чтобы различить носки, поэтому без инфракрасных датчиков со специальным алгоритмом распознавания или камеры, на такие предметы он наезжает. Лидар хорошо «видит» большие препятствия и объезжает их. Если есть домашние животные, то R10 может не подойти, так как не сможет объехать такие специфические мелкие «препятствия». Для подобных вещей нужны модели с камерой или инфракрасным зрением по распознаванию препятствий. Также у робота нет ножниц около валика, который бы срезал закрутившийся на нем мусор. Для решения такой задачи мне приходится переворачивать Redroad R10 и смотреть, как у него дела с чистотой валика.
Вроде бы это все ограничения, которые могли быть у меня в моменты уборки. Как видно, у меня их немного, поэтому Redroad R10 мне понравился. У меня чисто и чисто по расписанию.
Шум
Шум при уборке R10 находится на среднем уровне. В минимальном режиме робота слышно меньше всего. Можно включать его и вечером, но только на минимуме. Следующие режимы уже больше слышны. Звук варьируется от 60 до 72 дБ в зависимости от режима. У модели Roidme Eva показатель при меньшем номинальном разряжением, чем у R10, был больше: от 64 до 77 дБ. У Roborock S8 и Dreame Bot X10 Pro — от 59 до 65 дБ и от 57 до 65 дБ при номинальном разряжении в 6000 Па у обоих. У Abir X8 с номинальным разряжением в 6500 ПА — 57-66 дБ. Как видно, у обозреваемого робота-пылесоса Redroad R10 уровень шума повышенный относительно представленных.

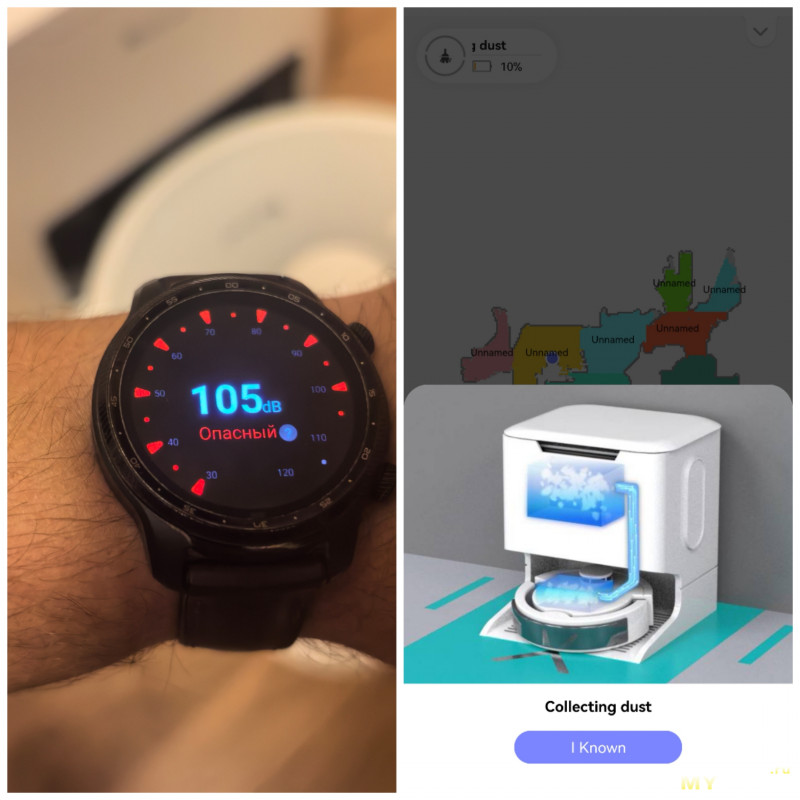
Станция самоочистки также шумит много громче, чем у Roidme Eva (101 дБ) или Dreame Bot X10 Pro (77). Максимальная громкость составляет у R10 105 дБ. На этом уровне она находится секунду, потом стабилизируется на 80 дБ. Процесс самоочистки проходит в два этапа, и громкость увеличивается аналогично. В вечернее время использовать станцию самоочистки опасно. Можно разбудить соседей.
Оценка мощности всасывания
Аэроватты — это мощность, необходимая для создания перепада давления в 1 Паскаль (Па) при воздушном потоке в 1 кубический метр в секунду (м³/с). Аэроватты равны 0,9983*Ватты. Далее Я буду считать, что два показателя мощности равны.
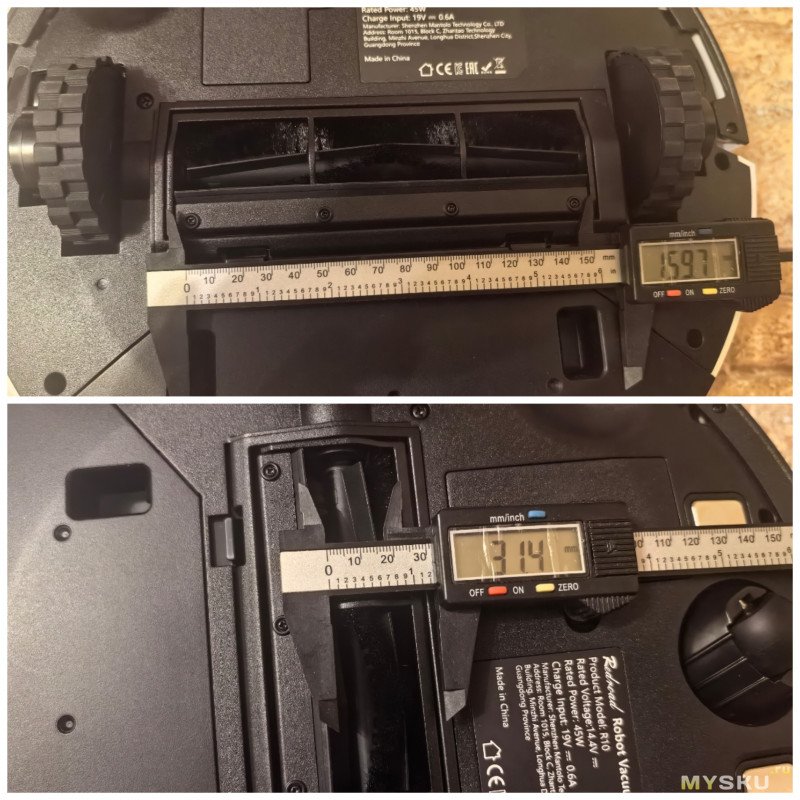
У робота всасывание происходит через отверстие внизу, в котором вращается валик. Площадь этого прямоугольника равна (160*31,4=) 0,005024 м².
На втором этапе надо знать поток воздуха в четырех режимах уборки. Для этого я взял анемометр, включил оценку максимального потока и подложил его под робот-пылесос, включал поочередно четыре программы уборки и как только он начинал движение, останавливал процесс. Смотрел на цифру анемометра. В результате получились следующие цифры, от 8,9 до 27,9 м/с. Проводил оценку несколько раз, чтобы исключить ошибку неправильного измерения. Цифры были похожи представленным на фотографиях ниже.
- Тихий 9,8
- Стандартный 19,2
- Сильно 27,7
- Максимально 27,9

Третьим действием была оценка приближенного к реальности разряжения. Использовал скотч для создания фиксированной одинаковой поверхности всасывания. В эту поверхность проводил трубку от вакуумметра и запускал каждую из четырех программ. Получились значения от 110 до 530 Па.

Оценки носят не совсем точный характер, так как прилегания не совсем плотное. Таким образом я оценивал другие модели роботов пылесосов. В таблице привел показатели по оцененным и реальным значениям.


По итогам оценки показателей получилось, что мощность всасывания у Redroad R10 оценивается от 5,4 до 74,3 Вт. В таблице привел оценки мощности всасывания по всем пылесосам. Получилось, что у Dreame Bot X10 Pro оцененная мощность меньше, чем у обозреваемого. Надо пояснить. Мощность всасывания зависит от площади, как и от других параметров, скорости воздуха и разряжения. Площадь всасывания у всех трёх моделей следующая: 0,005024, 0,0051832, 0,0043384, 0,0047456. У Bot X10 Pro — самое маленькое значение. Если использовать его в качестве площади, то мощность всасывания в максимальном режиме получится: 64 (Redroad), 88 (Abir), 67 (Dreame), 46 (Roidme).

Рассуждения выше привел для пояснения результатов. Они, конечно, условные, но показывают, что в роботе-пылесосе важно не только разряжение, но и скорость всасываемого воздуха с площадью всасывания. Поэтому модель с большей площадью и потоком воздуха могут иметь большую мощность всасывания. Это, в свою очередь, сводится к поговорке, зачем платить дважды, если можно получить схожий результат за меньшие деньги. В случае Dreame вместе с мощностью покупатель получает другие опции, как сушку горячим воздухом, лучшую влажную уборку с мопами, которые моются и сушатся теплым воздухом автоматически, а также камеру наблюдения за уборкой, распознавание предметов и возможностью подключения к водопроводу. Если кому-то такие опции не нужны, то в плане уборки все роботы пылесосы «плюс/минус» одинаковые.
Вывод
Робот-пылесос Redroad R10 — это хороший пример недорогой модели для сухой уборки. Оцененная мощность всасывания показывает, что и при меньшем разряжение, чем у топовых моделей, робот может убираться не хуже. Касательно возможностей у модели есть датчик ковра, четыре режима всасывания, он спокойно пылесосит темные поверхности, не застревает в углах, при уборке проблем нет (не «тупит»), а база самоочистки помогает выполнять обслуживание не каждый день. Как минимум на несколько дней я могу забыть о чистки фильтра, валика и, тем более, лотка для пыли. Для модели среднего ценового диапазона — это хороший показатель.
| +41 |
2026
54
|
| +45 |
1567
28
|
Даже производители указывают 0,3 * Вт
Ищите ошибку.
Я на своём пылесосе менял турбину c паспортных 3200ПА, на «типо» от Roborock с её паспортными 5500ПА, там используется движок KWT и крыльчатка уже с балансировкой, на средней мощности она кушает 2.8А, на максимуме 3.5А, батареи 5200mAh хватает на ~50мин на средней мощности до заветной планки 20%, на максимуме и того меньше.
4 атм 150 Вт и 6 атм 100 Вт
какой быстрее накачает колесо?
То есть давление/разрежение не единственный важный показатель :)
Имел ввиду, что нет опции по определению вида и типа самих предметов, а не просто, что это препятствие на пути лидара, которое R10 обходил. Добавлю в это место пояснение, а то, согласен, получается, как будто лидар есть, но препятствия он не распознает. Имел ввиду, что не может с точностью распознать, что это, носок, продукт жизнедеятельности, удлинитель и т.д.
Такой тест обладает слишком маленькой описательной способностью. В большинстве случаев он не приводит к однозначным выводам.
И бутылку надуть можно, но она разобьётся. От давления воздуха, но, правда, получить такой результат можно не ртом.
Попробуй продуй HEPA, удивишся что это не легко сделать даже когда она чистая, она съедает до 80% все тяги, и остается остаток чтобы затянуть пыль поднятую турбощеткой, и чтобы эта пыль не вывалилась обратно.
Я думаю, что если снять турбощетку, то тест с щелью вообще пройдет не каждый пылесос. Слишком мала тяга по сравнению с площадью захвата под щеткой.
С учетом того, что мощность всасывания в разы падает при заполнении пылесборника, то и измерять нужно когда он, например, наполовину заполнен.
Такие разговоры о 1/2, 1/3 или 2/7 заполненности бака не имеют под собой смысла. Всегда заявляется начальная цифра, на которую потом влияют физика.
А как только от'ехал («свинья грязи найдет») — пылесборник уже не пустой — иначе в чем смысл мероприятия? :)
Протирает полы он нормально, конечно не так как шваброй, но всё таки протирает. Тем более он это делает одновременно с сухой уборкой. Убрался дома сначала прогнав его по сухому, потом налил контейнер и ещё влажной, по ходу он убрал всё что пропустил в первый раз.
Единственный минус, нет расходников совсем. Вроде от Dreame подходит мешок. если подрезать уголки, а вот с тряпкой будут проблемы, таких пока не нашёл. Есть похожие. но крепление спереди другое.
Общался с официалами, говорят будут продувать расходники, но когда не понятно.
А вы с базой за 13,5 тыс.руб. купили? Если да, тосупер цена!Расходники можно здесь отслеживать или спросить у них — redkeyofficial.ru/rasxodniki/. Я у них для Redkey W13 покупал крепеж.
Это сколько раз робот будет подходить к станции самоочистки для сброса мусора во время уборки или что то другое?
Мне кажется это сложности перевода