Робот-пылесос Neato XV-14. Диссекция автономного кинетического эргоцида: морфологический анализ висцеральных компонентов

Поголовье Neato почти истребили самодельщики из-за ценности их лидаров. В отличие от других, эти лидары просты в использовании и хорошо описаны, а так же ардуинщики понаписали библиотек для них. В итоге Neato стал желанной добычей для роботостроителей. Сегодня мы проведем вскрытие одного из последних экземпляров и посмотрим, что там еще хорошего, что может привлечь внимание браконьеров.
Диссекция – (лат. dissectio – «разрезание») Медицинский термин для вскрытия трупа или хирургического рассечения тканей — не обязательно трупа. Здесь – просто «разборка».
Автономного – Работает без внешнего управления, понятно и так.
Кинетического – (греч. kinesis – «движение») Отсылка к тому, что пылесос перемещается, и так понятно.
Эргоцида – Псевдонаучный неологизм. «Эрго-» (греч. ergon – «работа») + «-цид» (лат. caedere – «убивать»). Буквально – «убийца работы» (пылесос «убивает» грязь — или нашу возможность поработать, но мы его «убиваем» в ответ). Если есть эцилоп и пепелац, отчего не быть эргоциду?
Морфологический анализ – изучение тканей новообразований на клеточном уровне, это не про грамматику.
Висцеральных компонентов – «Висцеральный» (лат. viscera – «внутренности») – намёк на «органы» пылесоса, вообще относится к внутренним органам, находящимся в брюшной и грудной полостях. Колёсики — не совсем внутренний орган, но и так сойдет.
Итоговый перевод на человеческий:
«Разборка самодвижущегося убийцы грязи: изучение его потрохов»
Краткая история вскрываемого экземпляра. Как то раз я как-то провинился перед супругой. Тарелки при этом бить она не стала, а вот невинный пылесос, находящийся у нее в руках, пострадал. С итоге он лишился дисплея. Работать он не перестал и еще долго использовался по назначению — запираешь его в комнате, ставишь магнитные полосы-виртуальные стены и он себе пашет. Но те функции, которые запускались с меню, оказались недоступны. Недавно на местной барахолке я обнаружил за смешные деньги почти такой же пылесос, по описанию владельца у него умер аккумулятор. А в связи с безвременной кончиной фирмы Neato Robotics запасные детали к нему оказались недоступны. У меня еще года три назад был припасен новый, уже литиевый аккумулятор для моего пылесоса, но старый упорно держался и не сдавался. Кстати, при замене аккумулятора пылесос требует его перекалибровать, а без дисплея этого уже не сделать. В итоге пылесос был куплен, слегка почищен и в него поставлены новые батареи, которые он откалибровал и с радостью отправился собирать пыль.
На фотографии — утреннее построение пылештурм бригады на плацу у пылесосного маньяка.

Итак, на фотографии наш герой, практически уже труп.

Батарейки — как они продержались столько лет, мне абсолютно непонятно. Но они до сих пор ого-го!

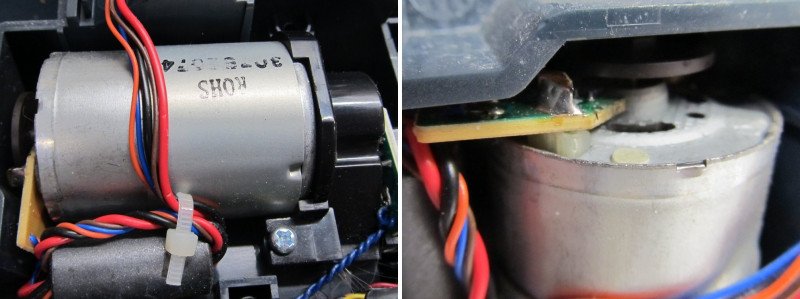
Вентилятор для высасывания пыли. Мощная вещь. Я на плате долго искал силовые элементы для управления им, полагая, что при такой мощности он должен управляться примерно как авиамодельные двигатели. Жизнь оказалась проще — он управляется так же, как компьютерные вентиляторы — ему нужны питание, на выходе от выдает сигнал от датчика оборотов, а управляется коэффициентом заполнения PWM.
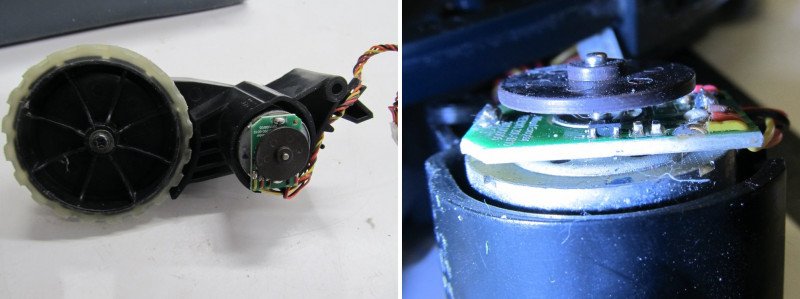
Колесо с моторчиком. Мотор управляется драйвером с максимальным током 2.8 Ампер, значит, его ток в районе 2 Ампер. Обычный коллекторный мотор, но снабжен датчиком Холла, измерителем оборотов и одометром соответственно. Ну да, Иван Фёдорович Крузенштерн — человек и пароход.
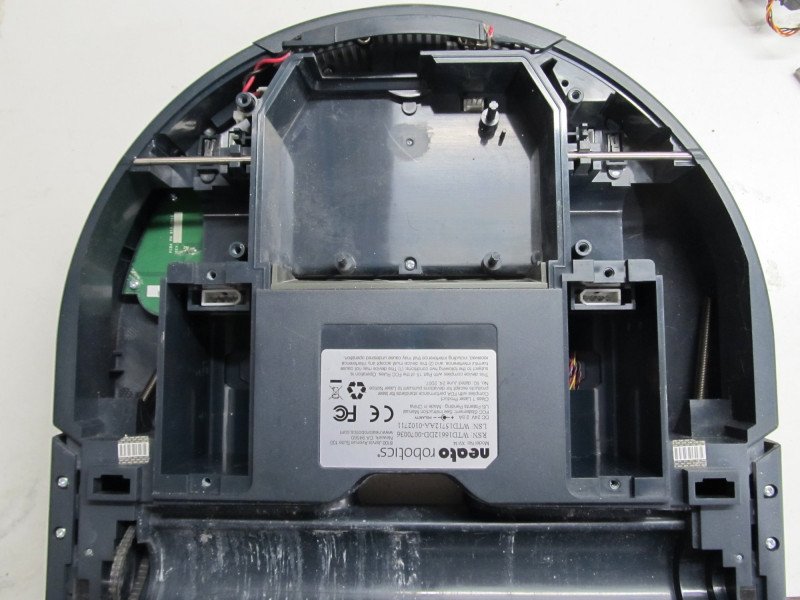
Сиротливое днище после извлечения части ништяков.
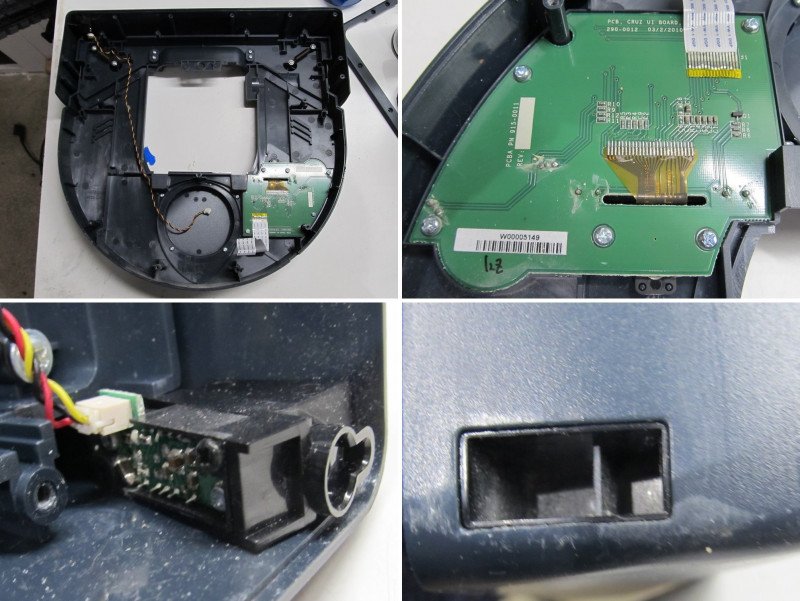
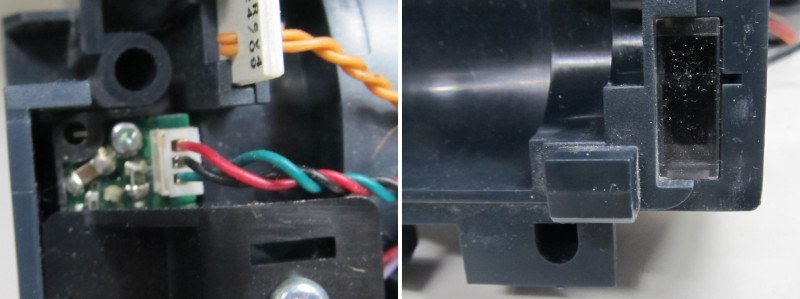
Снимаем крышку — вот он дисплей-страдалец. Еще один жгутик проводов идет к инфракрасному датчику приближения, который позволяет пылесосу приближаться максимально близко к стене. Датчик только с одной стороны, поэтому пылесосу приходится приспосабливаться — а кому сейчас легко?
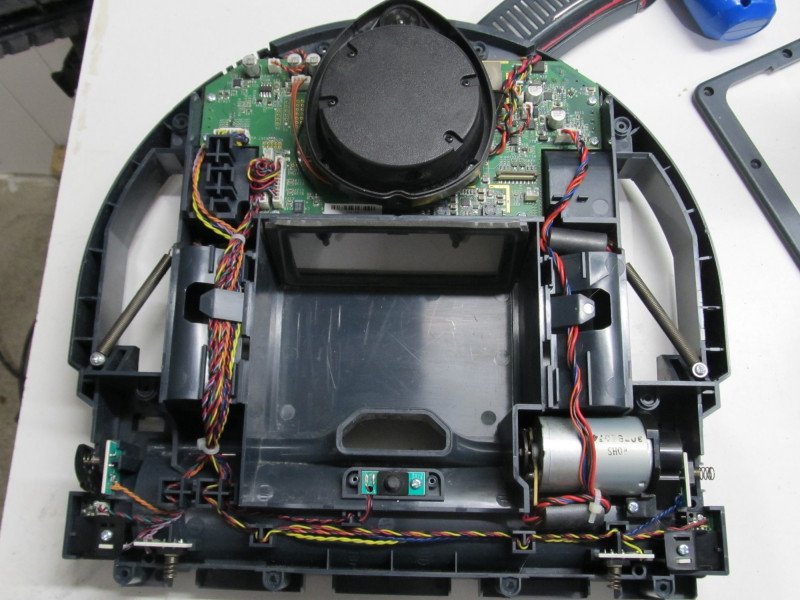
В перевернутом виде выглядит богаче — но это на на долго, сейчас поправим. А пока комментируем — на фото видна плата управления пылесосом, лидар над ней и коллекторный мотор привода щетки. С датчиком оборотов — все, как доктор прописал.
Подпружиненные контактные датчики — четыре штуки, они включаются, когда пылесос натыкается на что-то бампером, работают вперед и по сторонам. И датчик наличия пылесборника.
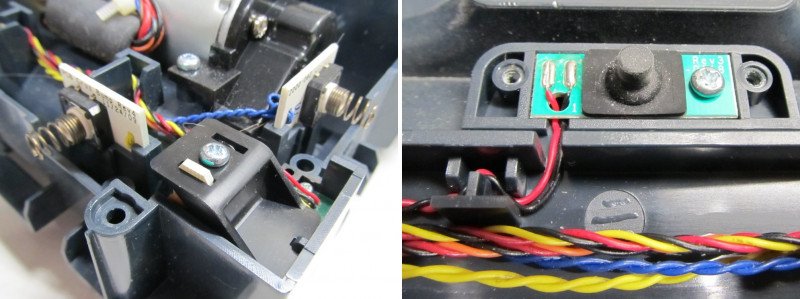
С помощью этого датчика робот стыкуется с зарядной станцией.
Два датчика по краям спереди — смотрят, чтобы пылесос не свалился с лестницы.
А это главный приз — лидар! Ведь красавец, да?

Лидар на базе Sensory SLAM (SICK LMS200)
- Дальность сканирования: 4-6 м.
- Угол обзора: 360°.
- Частота обновления: 5-10 Гц.
- Разрешение: 1°
- Интерфейс: UART, 115200 бод, простой ASCII-формат с данными о расстоянии.
- Библиотеки: rplidar-arduino, ROS-драйверы.

Но детали о нем в следующие раз — может быть. А может и не быть.
Переходим к мозгам — вид сверху и снизу.


По краям снизу — разъемы для подключения колес и датчиков «что вы себе позволяете, поставьте на пол меня немедленно!».
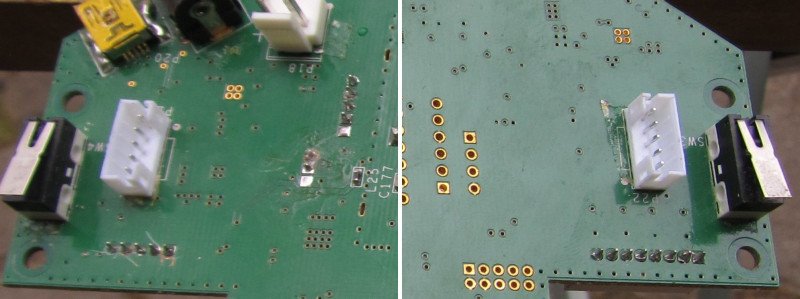
Сбоку — еще один разъем для питания и разъем USB — какой же ты нынче робот без USB?
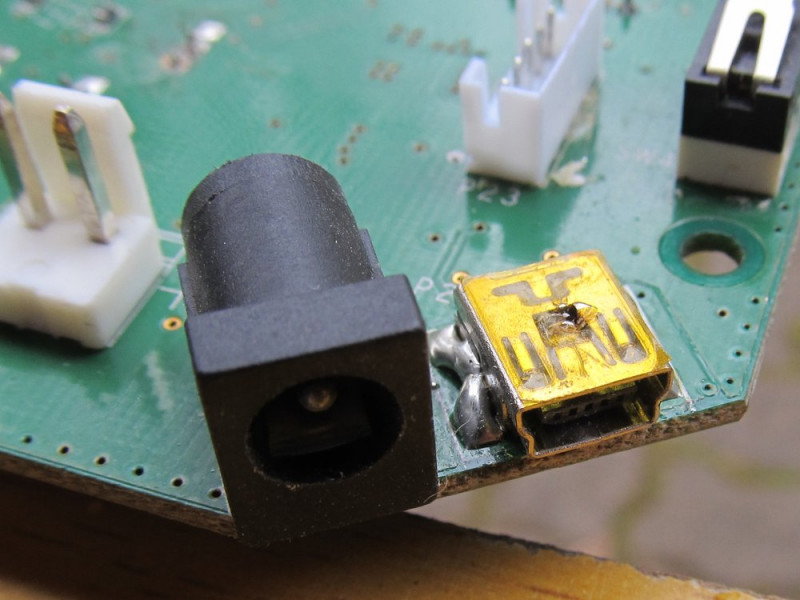
Но USB здесь не так прост, как может показаться. Кроме того, что его можно использовать для загрузки новых версий прошивки, через него можно получать информацию с датчиков и давать роботу команды — «поди туда — не знаю куда, и принеси то — не знаю что».
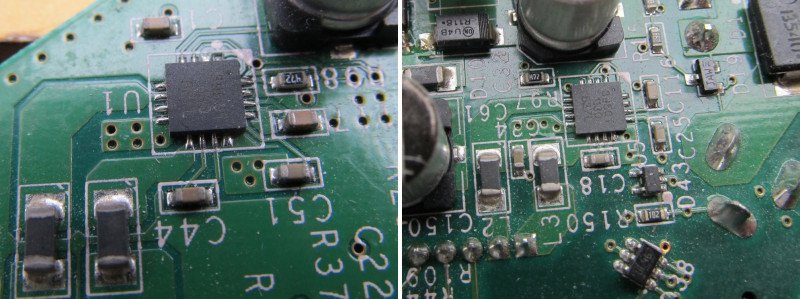
Главный думатель — микроконтроллер AT91SAM9XE128-QU. У него есть память — постоянная NAND128W3A2BN6 16Мбайт (на дне) и оперативная W988D6FB- 256Mb (32MByte) Mobile LPSDR, рядом с микроконтроллером. В общем, очень даже неплохо. Настолько большая оперативная память необходима для картографирования.
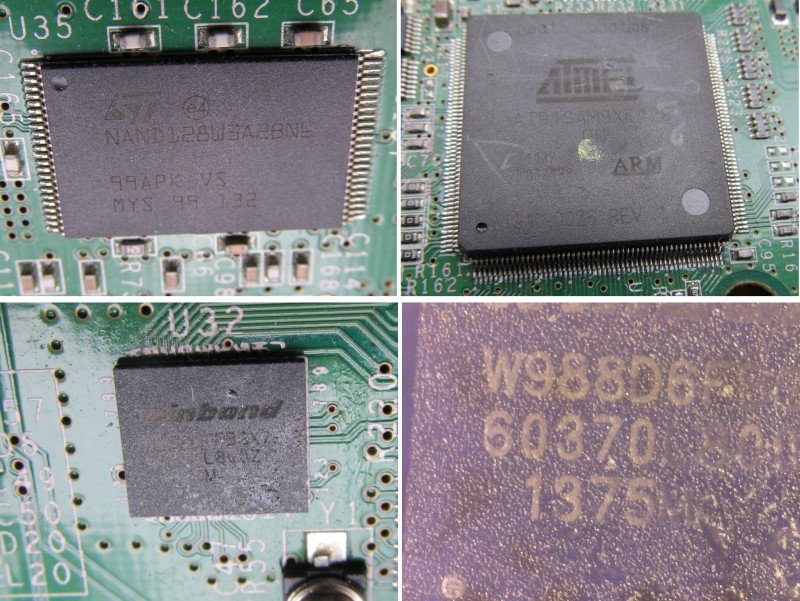
При жизни, робот обходил комнату по периметру и строил карту, потом чистил ее довольно-таки разумно, без случайных перемещений куда попало и пропусков участков. Но в отличие от современных коллег, он эту карту не сохраняет, поработал и забыл.
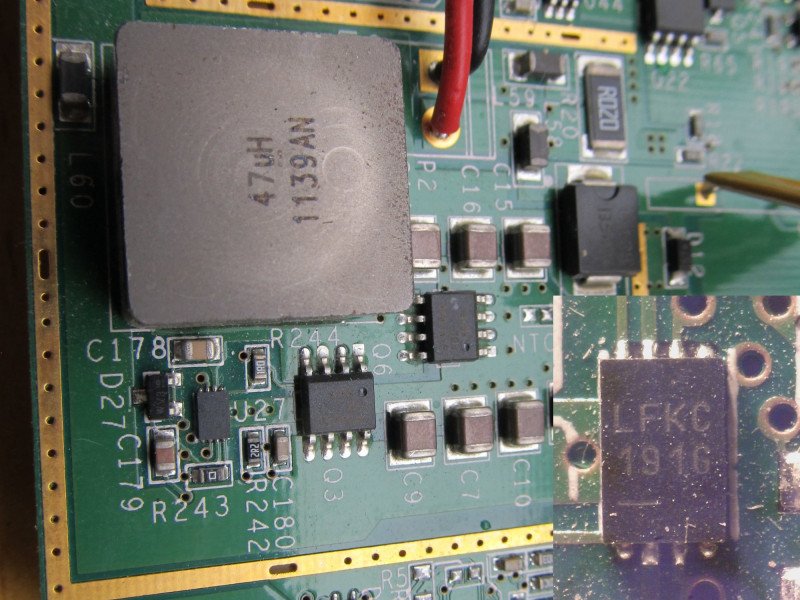
Это основной преобразователь для питания робота. Двигатели и прочее питаются не непосредственно от батареи, а от стабилизированных 12 Вольт. Индуктор впечатляет размерами. Что за контроллер — я не нашел, может, кто знает?
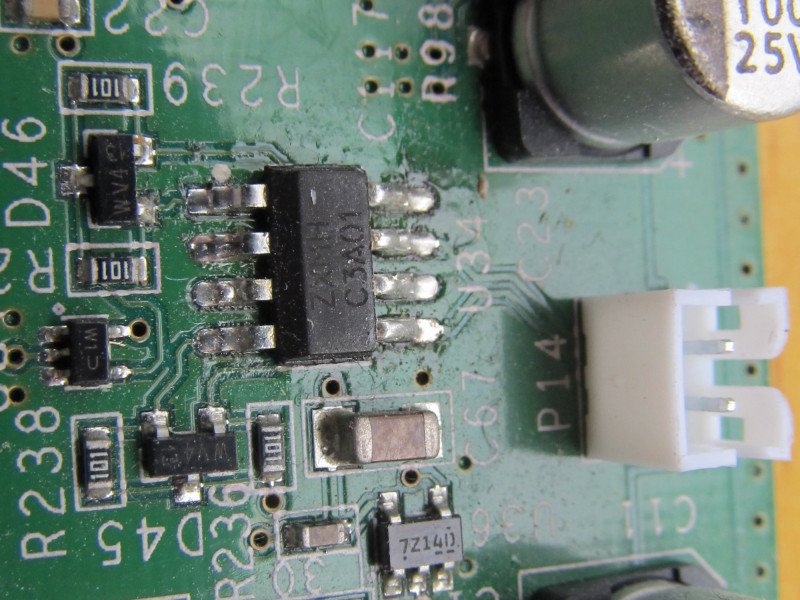
Мотором щетки управляет H-мост ZXMHC3A01T8, хотя зачем мост — я не знаю, щетка вроде бы всегда в одном направлении крутится.
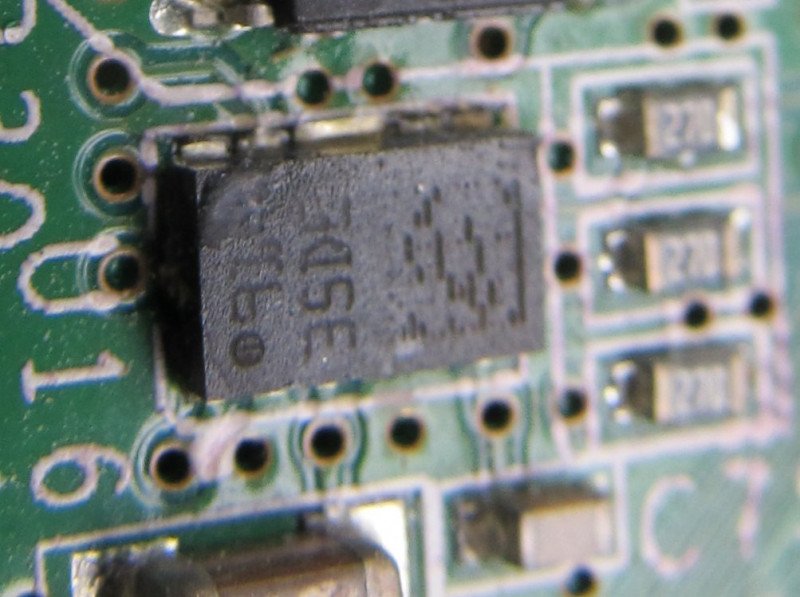
Для управления колесами — еще 2 моста A3950SEUTR-T, на разных сторонах платы.
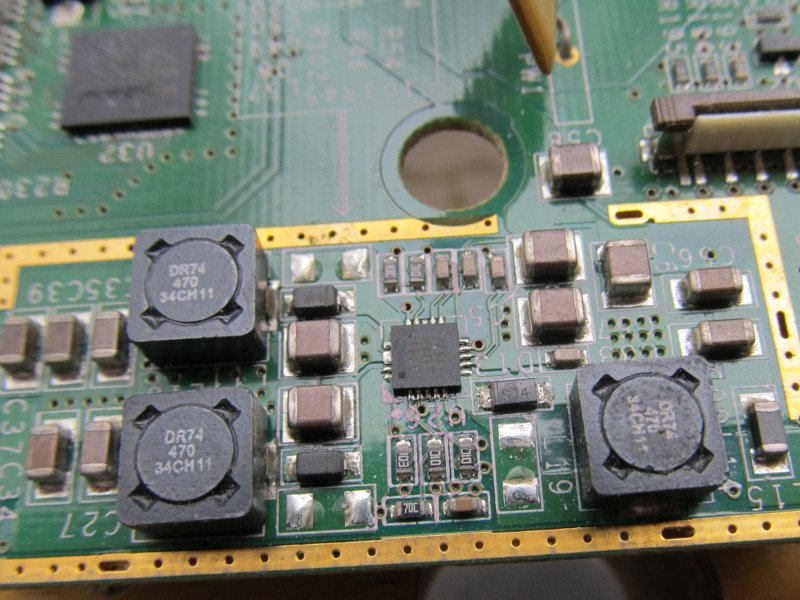
Питание обеспечивает A4490EESTR-T — одна микросхема делает 3 различных стабилизированных напряжения.
Рядом с микроконтроллером — акселерометр LIS302DL, следит, чтобы пылесос не оказался перевернутым.

Зарядная станция — выглядит большой и крутой. При вскрытии оказалась полупустой — небольшой стандартного типа блочок питания 24 Вольта 1.67 Ампер. Для паяльника маловато, но куда-то может сгодиться.

Ну и в итоге — самые полезные ништяки. Колеса и лидар я пристрою в очередную самоделку, а куда деть вентилятор — пока не решил, но он мне определенно чем-то нравится.
Итак, патологоанатомический эпикриз — пациент умер в результате вскрытия.
| +60 |
2242
40
|
| +13 |
961
20
|
Но таки у Neato проще — но у Xiaomi дальность получше.
Высокий индекс энтропийной нагрузки на неподготовленный перцептивный аппарат;
Латентные риски онтологического коллапса при интерпретации трансгрессивных данных;
Необходимость наличия квантово-герменевтического бэкграунда для деконструкции эргоцидных синдромов,
можно заключить, что данное исследование релевантно лишь для узкого круга посвящённых, чья нейросенсорная архитектура прошла калибровку в парадигме нелинейного познания. Для остальных субъектов познавательной деятельности рекомендована трансляция результатов в режиме редуцированной симуляции (желательно через призму катафатического мифотворчества).
Такую игрушку загубили… а можно было луноход построить пионЭрам!
силойсвоей милотой.Работает до сих пор, один раз заменил батарею.
Вещь!
Вроде как это был первый из роботов с лидаром и самым мощным всасыванием. На тот момент выбор был скромный — Roomba, Samsung и что-то ещё. Neato был вне конкуренции.
Пример перевода на японский:
У меня до сих пор трудятся два Ботвака ВайФай, на что их менять по мере износа — ума не приложу. Все эти Дирмы и Робороки, даже убирающие носки и провода — не пылесосят нормально по сравнению с Неато.
в своем я задолбался менять батарейки. хватало на год-полтора. первые пару замен смог заказать на озоне родные, потом брал на али, а там та еще лотерея. на литий так и не сподвигся переделать, купил roborock s5 с боковой щеткой на замену.
не понимаю, что нынешним производителям пылесосов мешает сделать форму, как у неато и щетку широкую поставить. зачем-то начали делать выдвижные боковые щетки и тряпочки