Моторы Nema23 с драйверами и блоком питания. Мультиобзор.

- Цена: $190 за все
- Перейти в магазин
Продолжаю отчет по долгострою.
Шаговые двигатели Nema23 с драйверами Leadshine DMA860H и блоком питания 48В — недообзор. Измерения момента силы не будет. Будут подробные фото, измерение сопротивления и индуктивности (что было под рукой, тем и мерил), разборка — куда же без нее.
Как проверить шаговый мотор без микроконтроллера и без единой строчки кода? Элементарно, нужен только энкодер. Как? Прошу под кат.
Введение
Зачем мне все это нужно? Чтобы ответить на этот вопрос, нужно отмотать страницу на полгода назад — там я начинал очередной долгострой, а сейчас под руку подвернулась куча старых фото, добавить еще материала — можно отчитаться по еще паре пунктов проекта [название удалено]. И кто же первым угадает или вспомнит? Начнем:
Двигатели
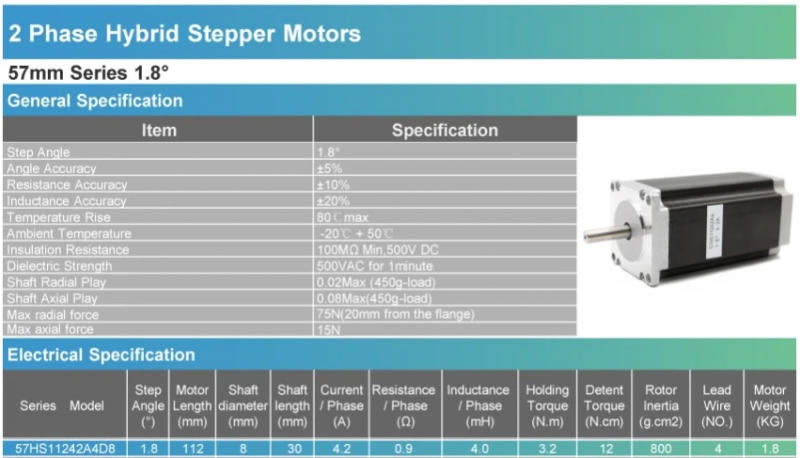
Часть 1. Nema23 x 112 мм
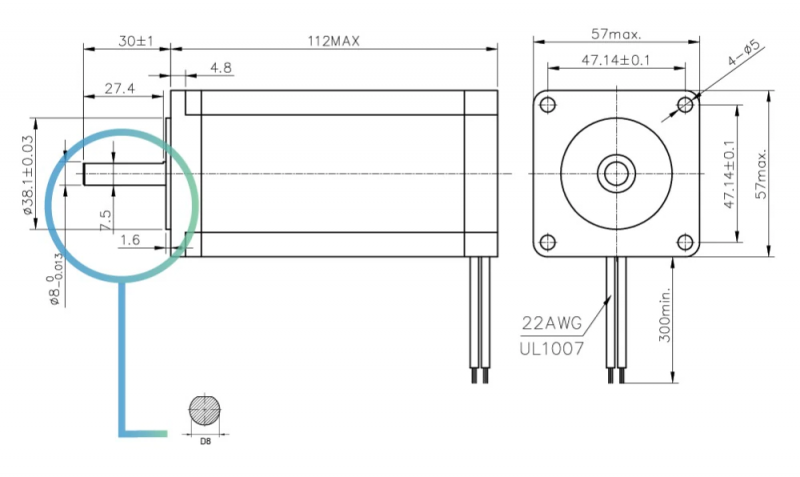
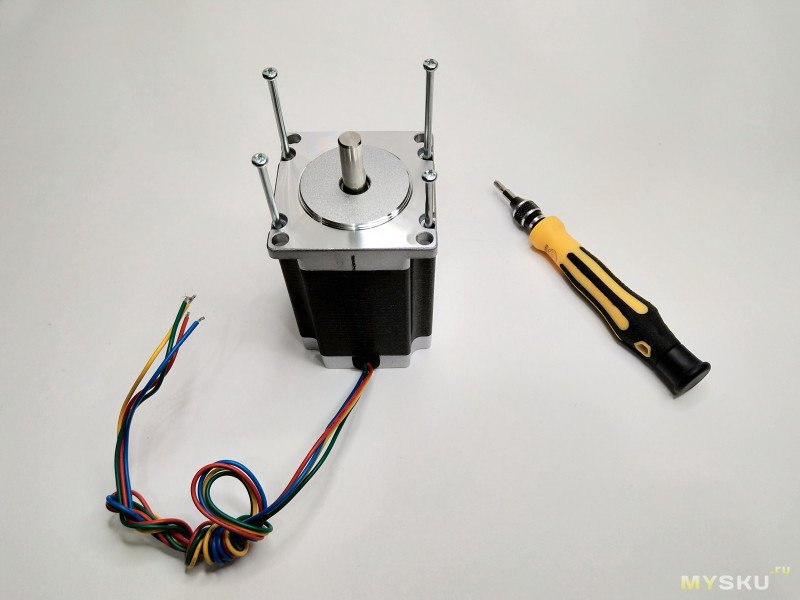
Двухфазный гибридный шаговый двигатель Nema23 длиной 112 мм
Угол шага: 1.8 град.
Ток: 4.2 А
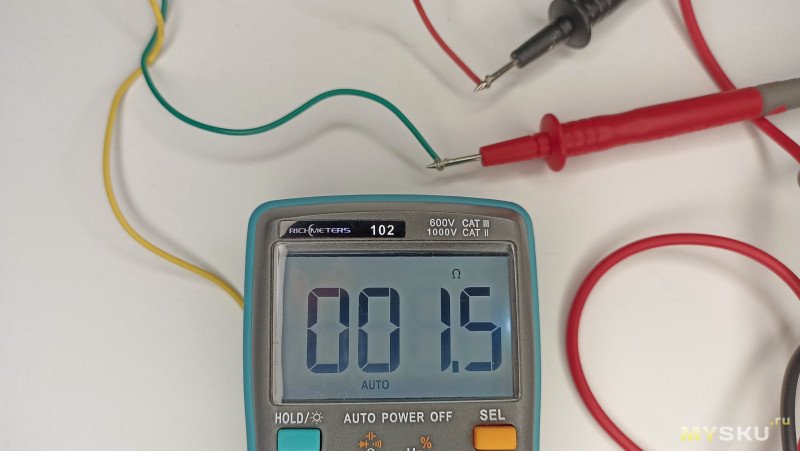
Сопротивление обмоток: 0.9 Ω
Индуктивность обмоток: 4.0 мГн
Момент силы: 3.2 Нм
Диаметр вала: 8 мм (с лыской)
Одиночный вал
Поставляются двигатели в простых картонных коробках.

Моторы надежно защищены поролоновым ложементом.
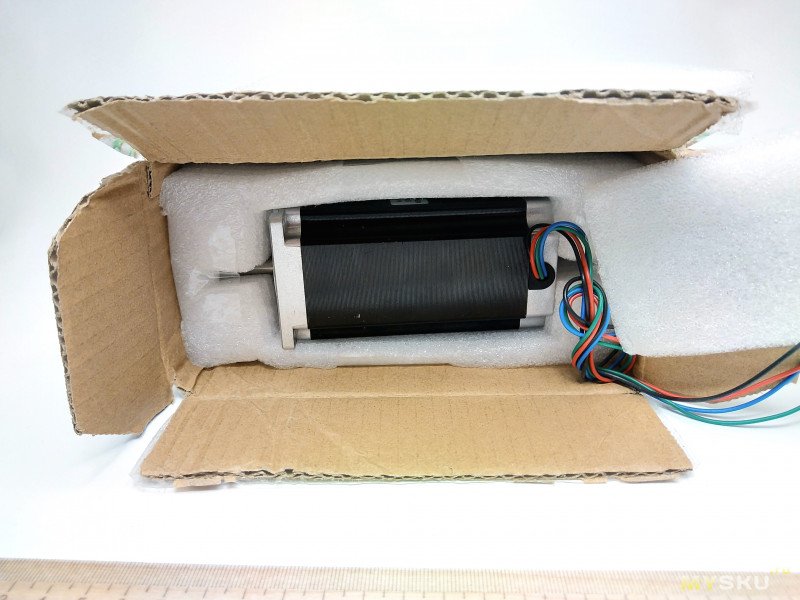
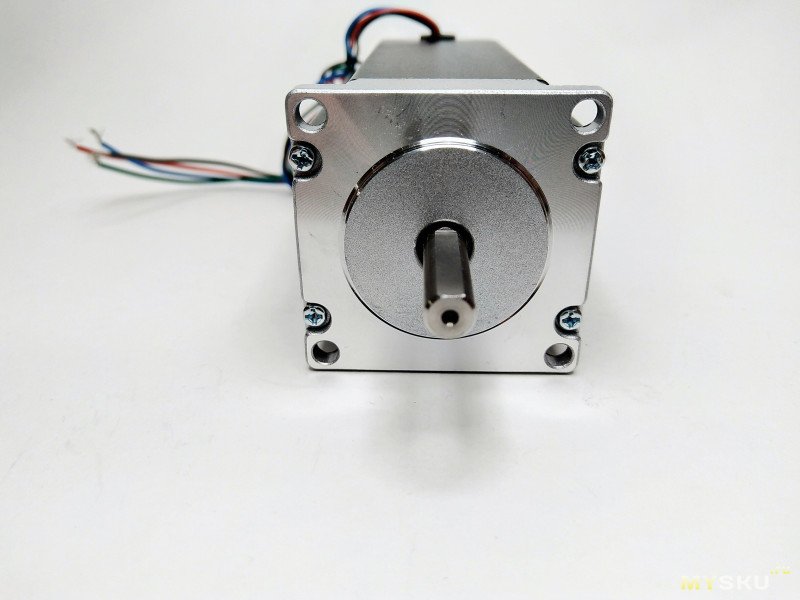
Вот и первый из героев сегодняшнего мультиобзора. Провода несъемные, 30 см длиной, без разъемов.

Вес 1650 г.

Сравнение со среднестатистическим Nema17:
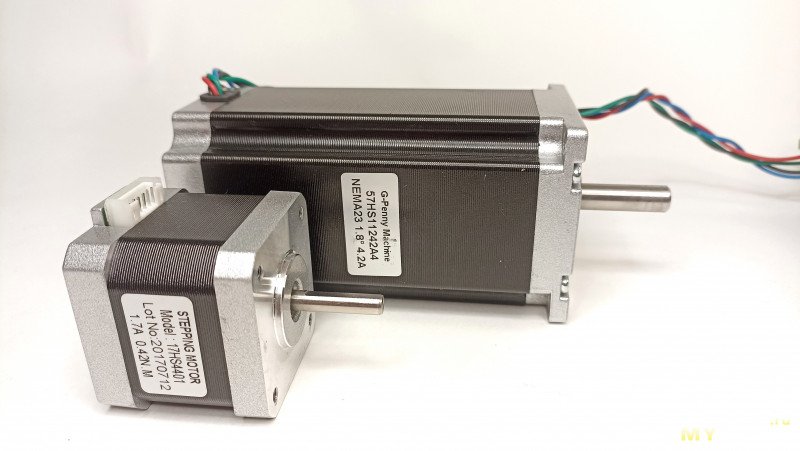
Моторы имеют обычное для такого типоразмера крепление — фланец под 4 болта М5, 47.14 х 47.14 мм. Размерчик, по сравнению с Nema17, непривычный. Вал 8 мм с лыской.
Откопал самодельный транзистор тестер Маркуса. Сопротивление обмоток 1.5 Ом, индуктивность 4.72 мГн. Индуктивность вполне укладывается в заявленную продавцом погрешность, а вот сопротивление выбивается.

Переходим к разборке.

Снять переднюю крышку не просто — посадка довольно тугая.

После снятия крышки, ротор тут же примагнитился к статору. Чтобы вытащить его, нужно приложить заметное усилие.

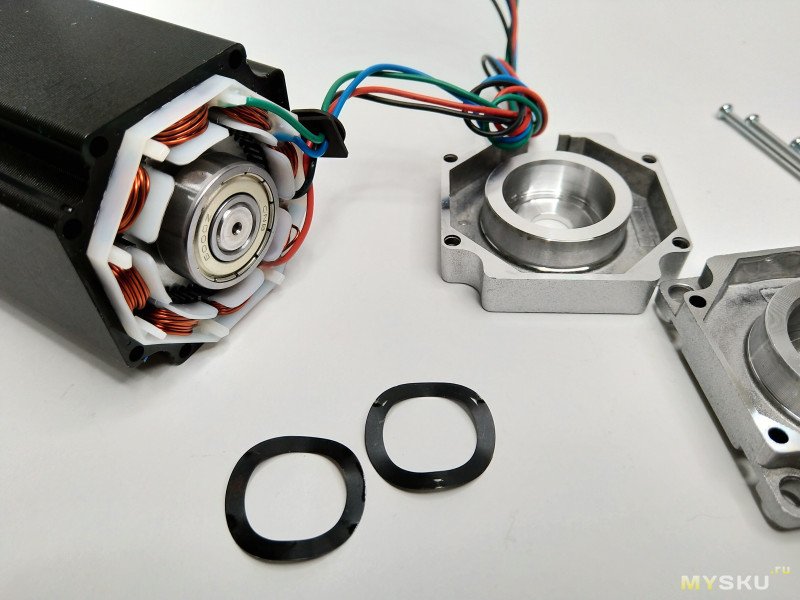
У статора 8 катушек — 4 пары полюсов, расположенных напротив друг друга.

Что там за зубцы? Нужно показать на картинке.
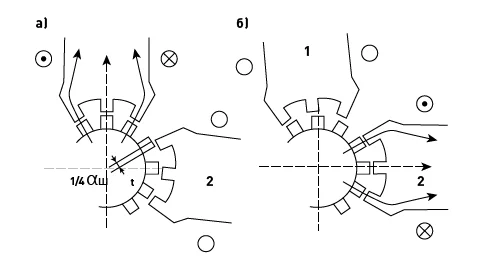
Это гибридный шаговый двигатель. На статоре и роторе имеются зубцы, расположенные в осевом направлении. Ротор разделен на 2 части, между которыми находится постоянный цилиндрический магнит, так что зубцы с одной половинки ротора являются северными полюсами, а с другой – южными. Кроме того, зубцы на половинках ротора смещены на половину шага.
Подобная конструкция позволяет получить меньшую величину шага, больший момент и большую скорость шаговиков, за которые мы их и любим.
Передний и задний подшипники 6000Z, под задней крышкой установлены опорные пружинные кольца. Осевой люфт у этой конструкции, само собой, присутствует.
Вытаскиваем ротор. Разборка, в целом, не сложная, конструкция доступна для чистки и замены подшипников. Чистка в нормальных условиях эксплуатации понадобится нескоро, а вот с подшипниками — как повезет.

Убеждаемся в отсутствии лишних деталей (мало ли что успело примагнититься), собираем в обратном порядке.

Часть 2. Nema23 x 82 мм
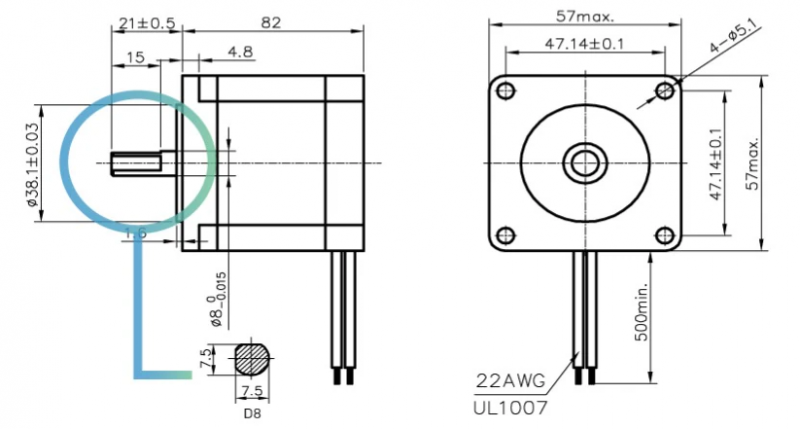
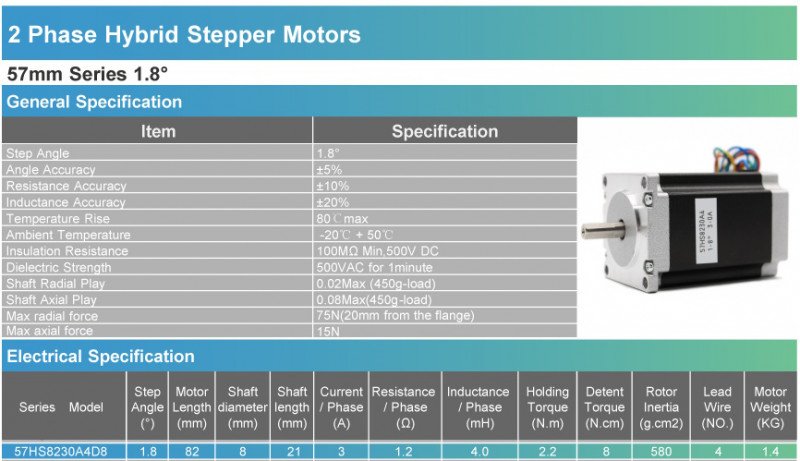
Двухфазный гибридный шаговый двигатель Nema23 длиной 82 мм
Угол шага: 1.8 град.
Ток: 3.0 А
Сопротивление обмоток: 1.2 Ω
Индуктивность обмоток: 4.0 мГн
Момент силы: 2.2 Нм
Диаметр вала: 8 мм (с лыской)
Одиночный вал
Второй мотор короче, момент силы меньше, максимальный ток меньше, но принципиально не отличается.
Вес 1133 г.

Еще одно фото для наглядного сравнения: Nema23 112мм, Nema23 82мм, Nema17 40мм, Nema14.

Измеренное сопротивление обмоток 1.6 Ом, индуктивность — 4.67 мГн. Ситуация аналогична предыдущему шаговику.
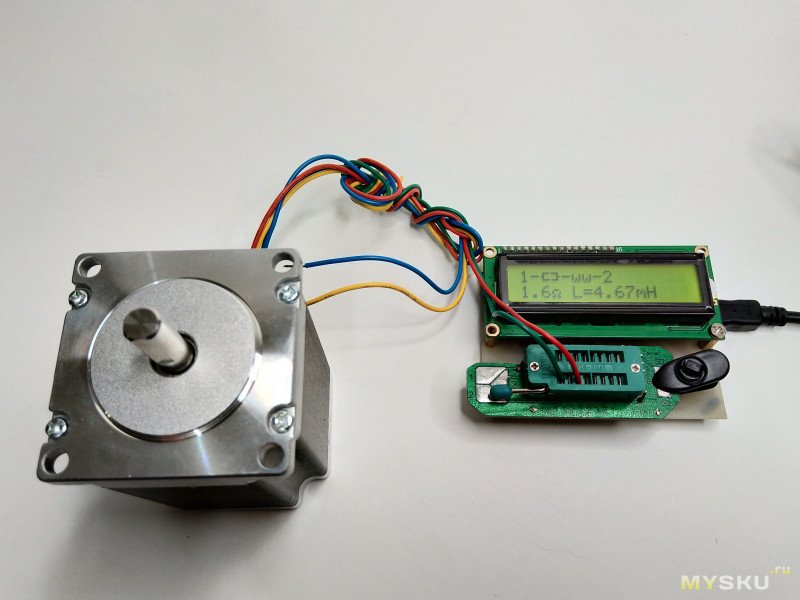
Может у меня транзистор тестер кривой? Нет, не так велика разница с Richmeters 102.
Второй мотор я тоже разобрал, и внутренности, что за неожиданность, у него не отличаются.
Драйвер Leadshine DMA860H
Поставляются драйверы в фирменных картонных коробках.


Разница с драйверами для Nema17 колоссальная.
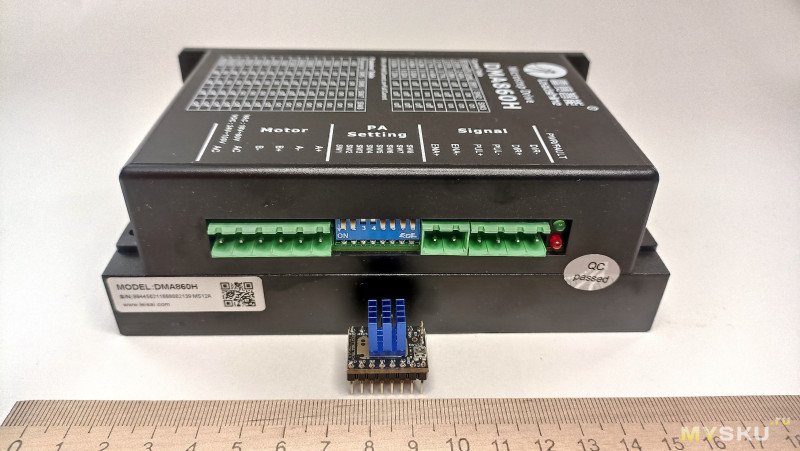
На верхней крышке имеется таблица с информацией по настройки тока и количества импульсов на оборот вала.


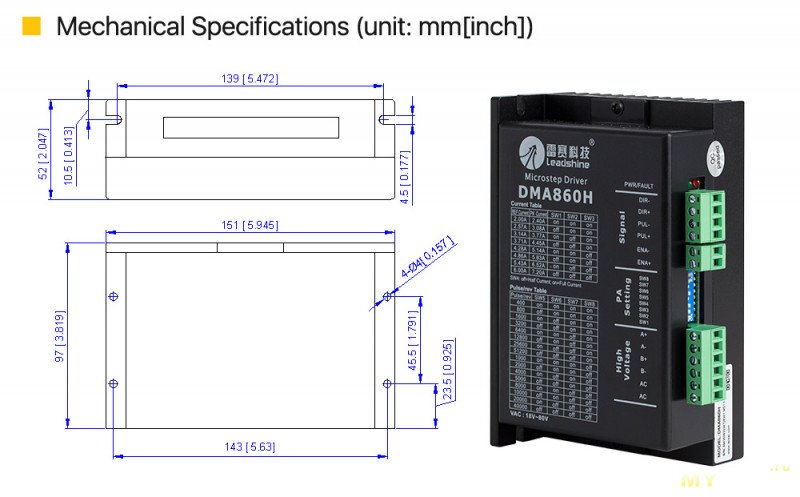
Драйвер прикручен к радиатору, имеет на борту кулер 40х40 мм для активного охлаждения.


Размеры драйвера 151 х 97 х 52 мм. Вес драйвера 570 г.

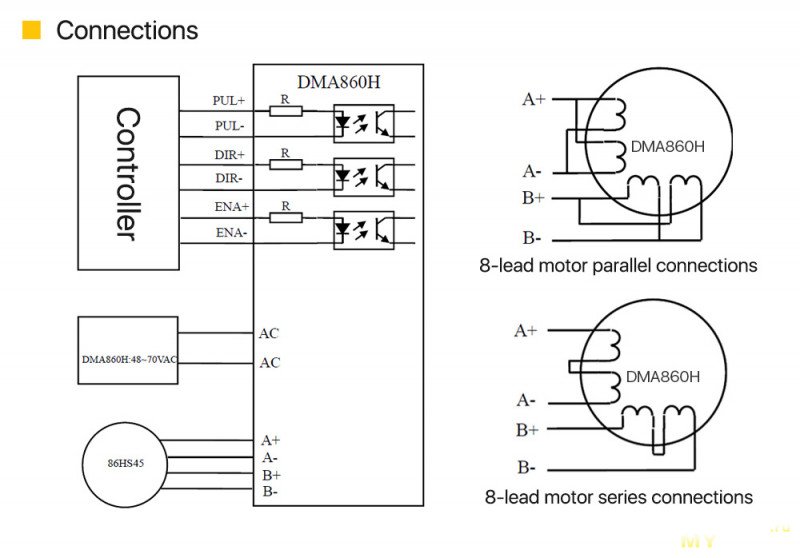
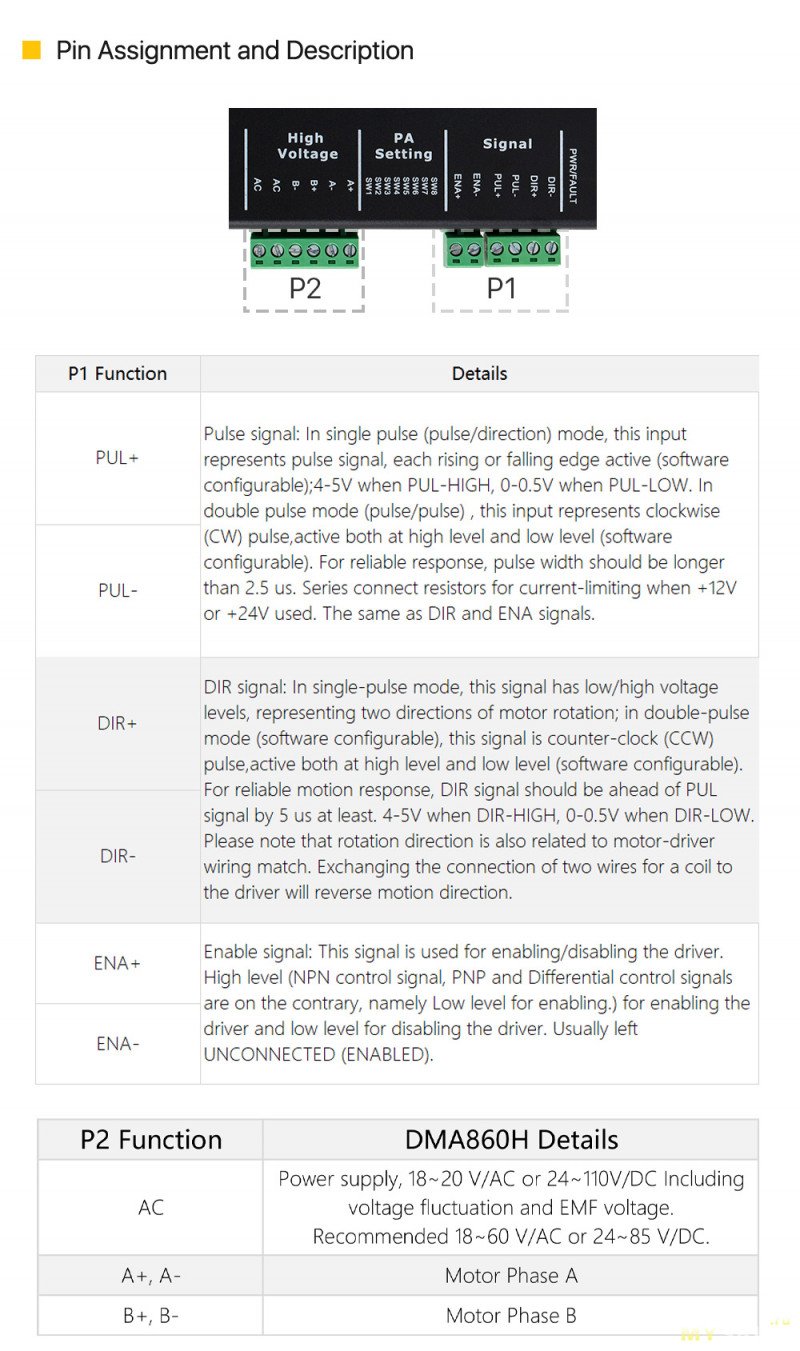
С торца расположены съемные клеммные колодки [которые облегчают подключение и техническое обслуживание], переключатель режимов работы драйвера и индикаторные светодиоды (питание и неисправность).

Драйвер может работать как в одноимпульсном (STEP/DIR) режиме, так и в двухимпульсном (CW/CCW). Частота управляющих сигналов до 300 КГц. При перегрузке по току, повышенном или пониженном напряжении индикатор ALARM мигает. Да, в драйвере есть защиты от перегрузки и перегрева.
Разборка

Драйвер выполнен качественно. К пайке претензий нет. А вот с контроллера маркировку спилили. По информации из интернетов — скорее всего это STM8.
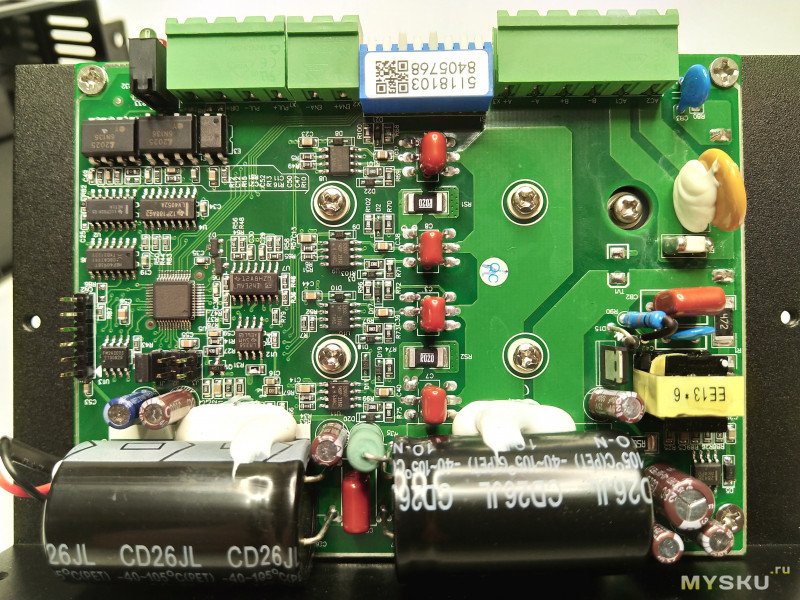
Имеется опторазвязка управляющих сигналов STEP, DIR, ENA: для первых двух используются оптроны 6N136. И вот тут стоит посмотреть поближе, да внимательнее почитать даташит, особенно графики:
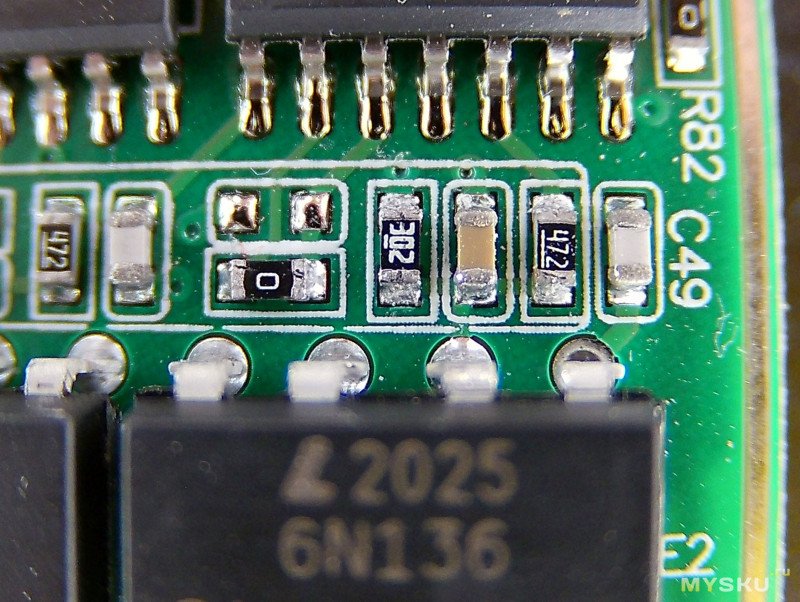
Нагрузочный резистор оптопары RL = 3 КОм. И что же мы имеем? Задержка распространения сигнала, случайное изменение (искажение) длительности каждого передаваемого импульса и еще ряд параметров выше в 2-4 раза, чем могли бы быть. Можно упереться в максимальную рабочую частоту, в частности, с малым микрошагом, и получить себе проблем на ровном месте. Номинал можно уменьшить до 1.9 КОм.
По документации логический ноль соответствует напряжению 0-0.5 В, единица — 4-5В, но практика показывает, что нормально работает с уровнем 3.3 В, как раз укладываемся в ток открытия оптопары. Поддерживается управляющий сигнал до 24 В, но необходимо добавить токоограничивающий резистор.

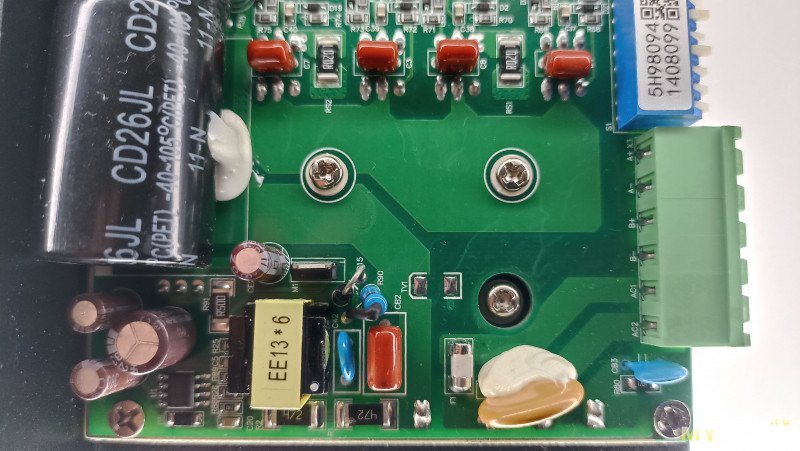
По линии питания выглядит также хорошо: широченные дорожки, варистор TVR14301, пара… скорее всего разрядников, припаянных бутербродом, есть посадочное для TVS диода, который, правда, не стали ставить,
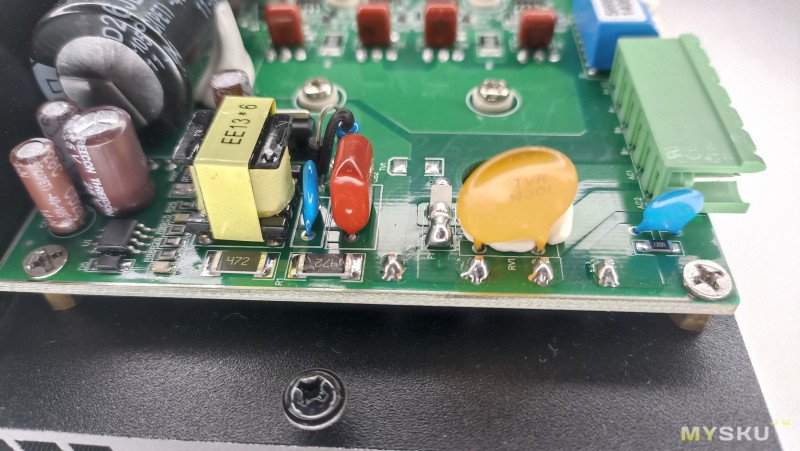
корпус сидит на земле через высоковольтный конденсатор и резистор типоразмера 1206 (для данных напряжений — достаточно). Хорошо сделано, приятно смотреть.
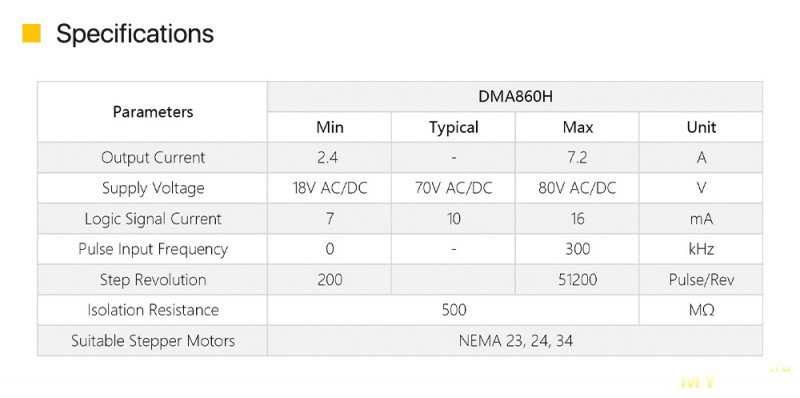
Рекомендуемое напряжение питания: 16-60 В переменного тока или 24-85 В постоянного.
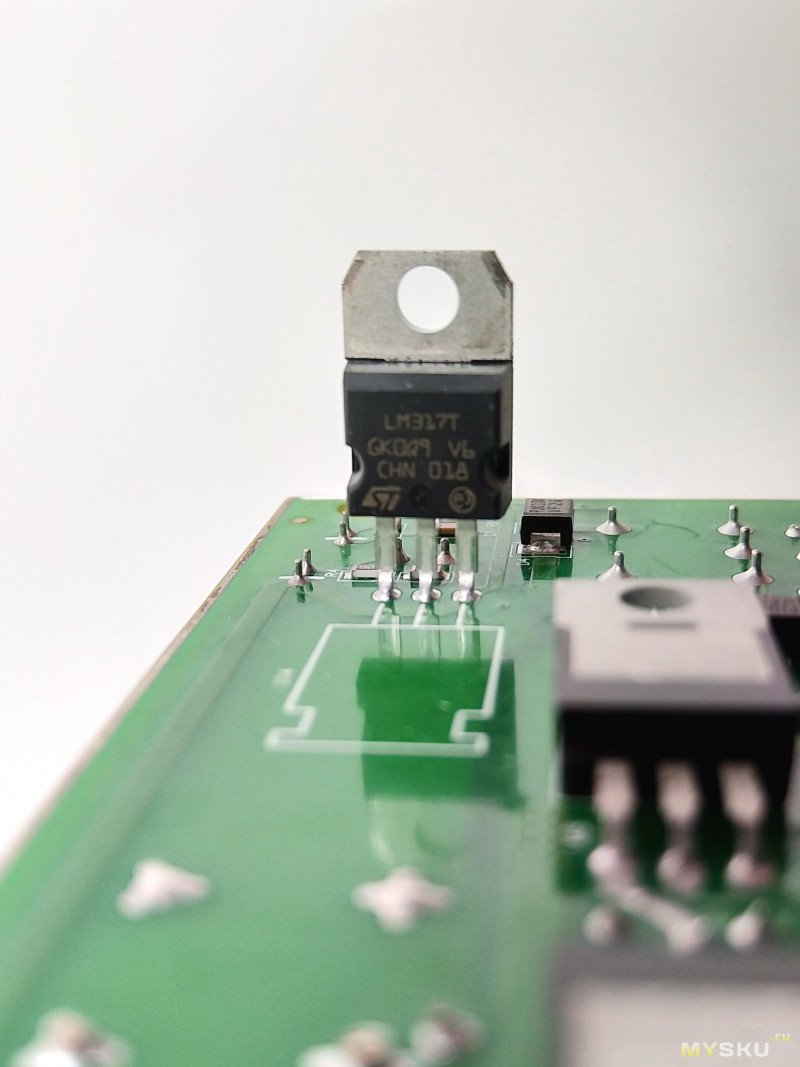
На транзисторах имеется изоляционная прокладка, дополнительно намазанная термопастой.

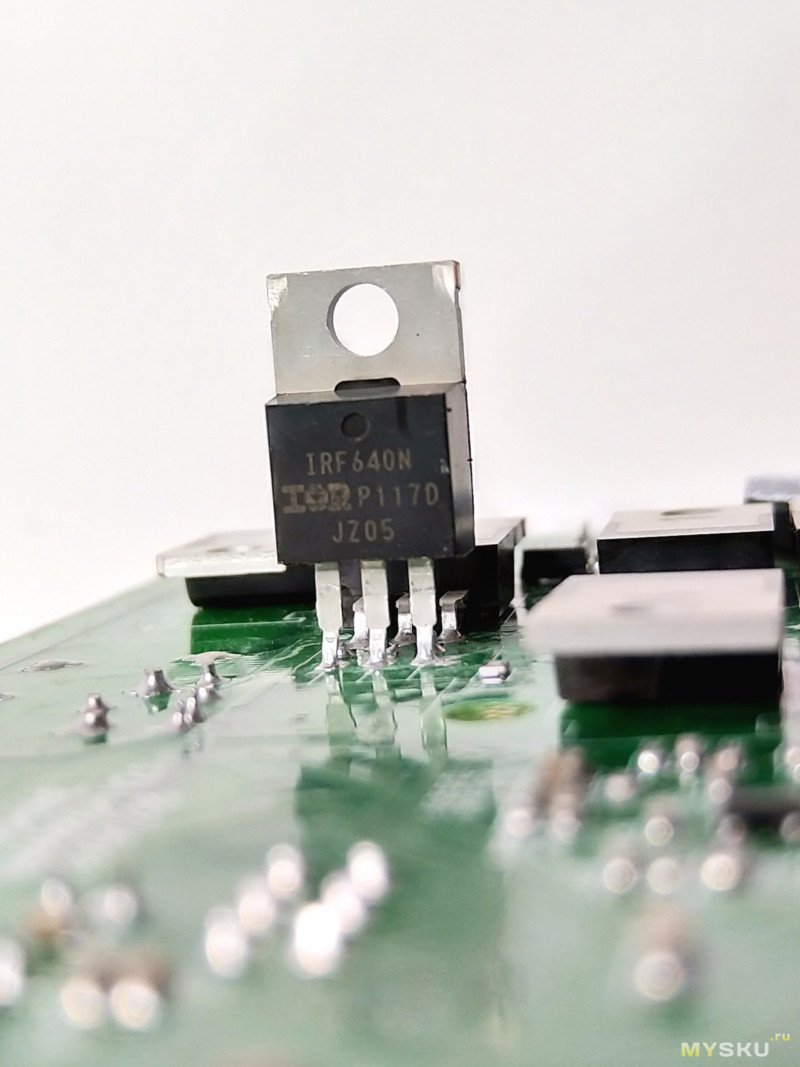
Видим приличных размеров диодный мост, 8 полевиков и еще что-то в корпусе TO-220,
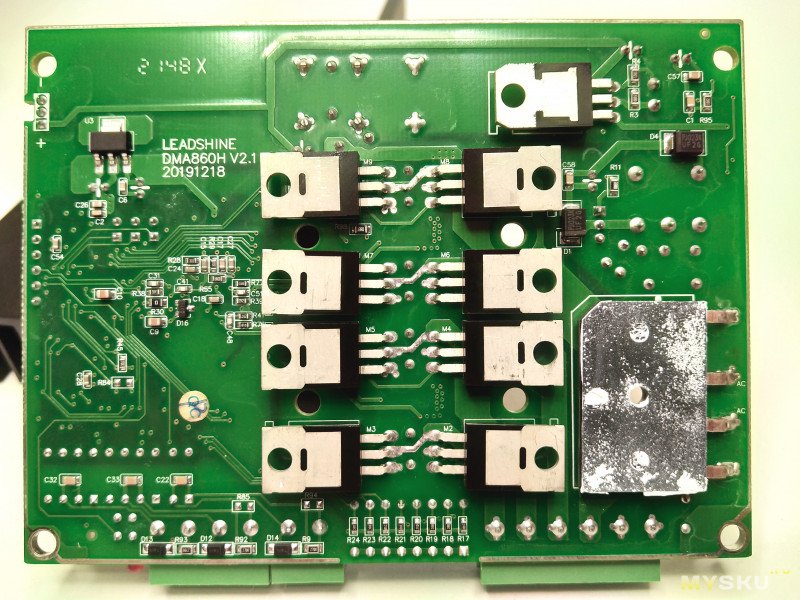
это регулируемый стабилизатор напряжения LM317T. А полевики IRF640N.
NoName блок питания 48 В. Недообзор.
Уж сколько раз твердили миру...
Берите MEAN WELL
Упакован блок питания в картонную коробку без опознавательных знаков.

Содержимое надежно защищено поролоном.

Что ж, пока что выглядит неплохо.

Штука довольно массивная.


Но не сказать, что особо увесистая.

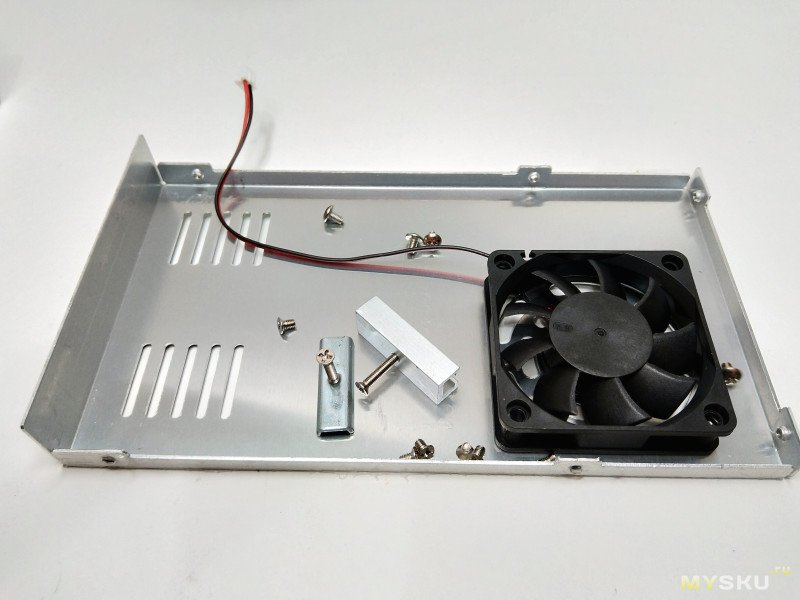
Есть кулер для активного охлаждения. На нижней стороне расположен крепеж М4.

На боковых гранях также есть крепеж М4, кроме наклейки и переключателя 110/220 более ничего интересного нет.


Все самое интересное внутри, и сейчас мы посмотрим, где у ей неонка. Раскручиваем 6 винтов М3. Не так плохо, как могло быть.

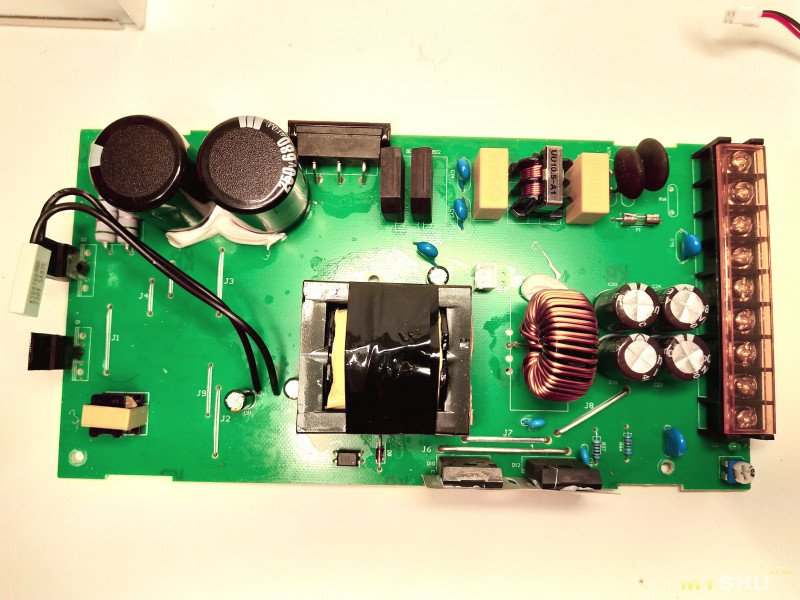
Силовые элементы сидят через толстые алюминиевые пластины для лучшей теплопередачи. На входе стеклянный предохранитель, 2 здоровых терморезистора 5D-15 в параллель, фильтр с Y2 и Х2-конденсаторами, синфазным дросселем, 2 диодных моста KBL608 (6 А) в параллель, без радиаторов. Варистора нет, а посадочное под него — есть, только маловато, и ДО предохранителя.
На выходе 2 диодные сборки JDAC30U60ASD (30 А 600 В),
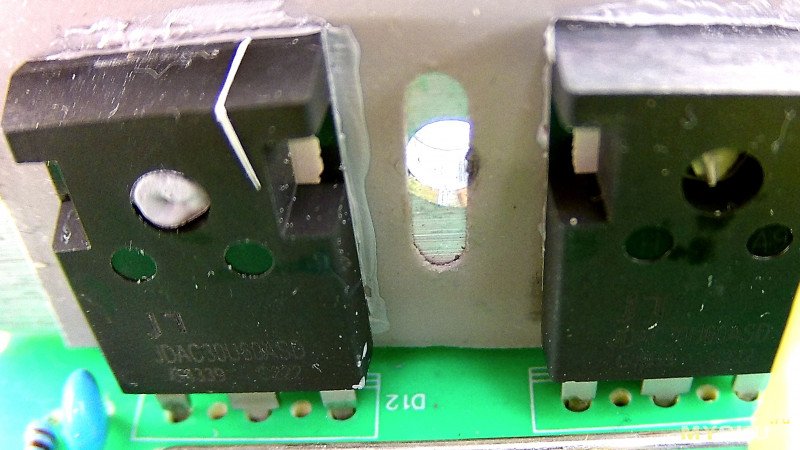
4 конденсатора haocon (?) 470 мкФ 63 В, дроссель, намотанный проводом 0.75~0.8 мм2, что мягко говоря, мало.

Имеется подстроечный резистор для корректировки выходного напряжения.
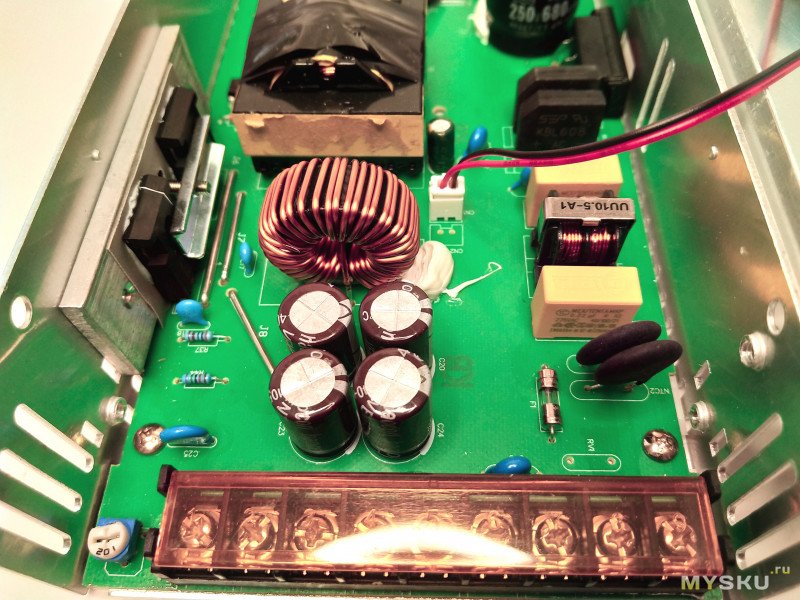
На входе конденсаторы KMG 680 мкФ 250 В, с переключателем 110/220, то есть 340 мкФ для 220 В. Условно, должно быть 100 мкФ на 1 Ватт мощности, но при напряжении 220-240 В и нормальной схемотехнике можно уменьшить емкость пополам.
Термореле есть — тоже неплохо.
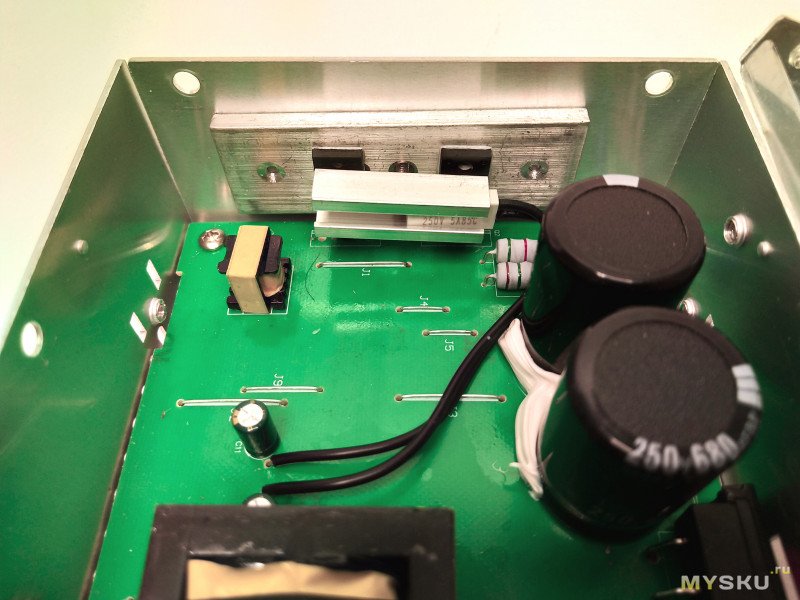
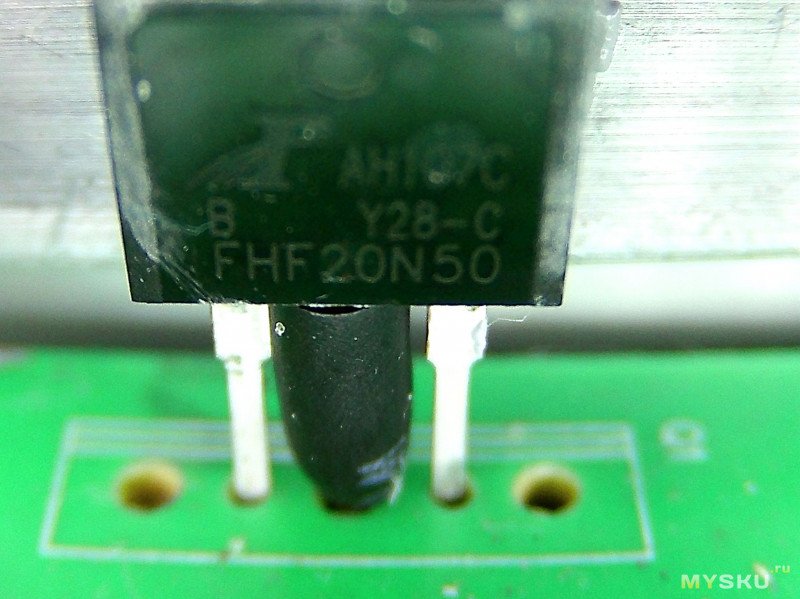
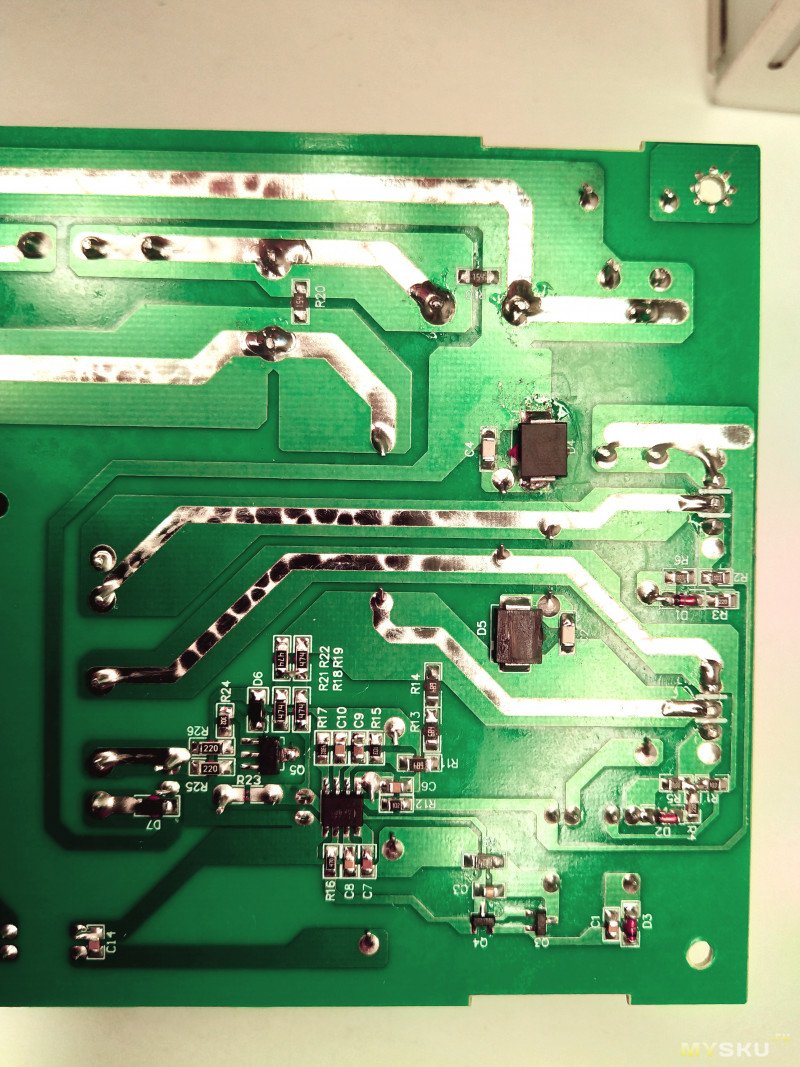
2 силовых ключа FHF20N50 (20 А 500 В). Нет, это не ферритовая бусина. На ножке только термоусадка.
Под платой лист пластика-изолятора. Кулер, кстати, низкопрофильный 60x60. Ключи сидели на термопасте, диодные сборки — через термопрокладку, приклеенную к ним на термопасту.

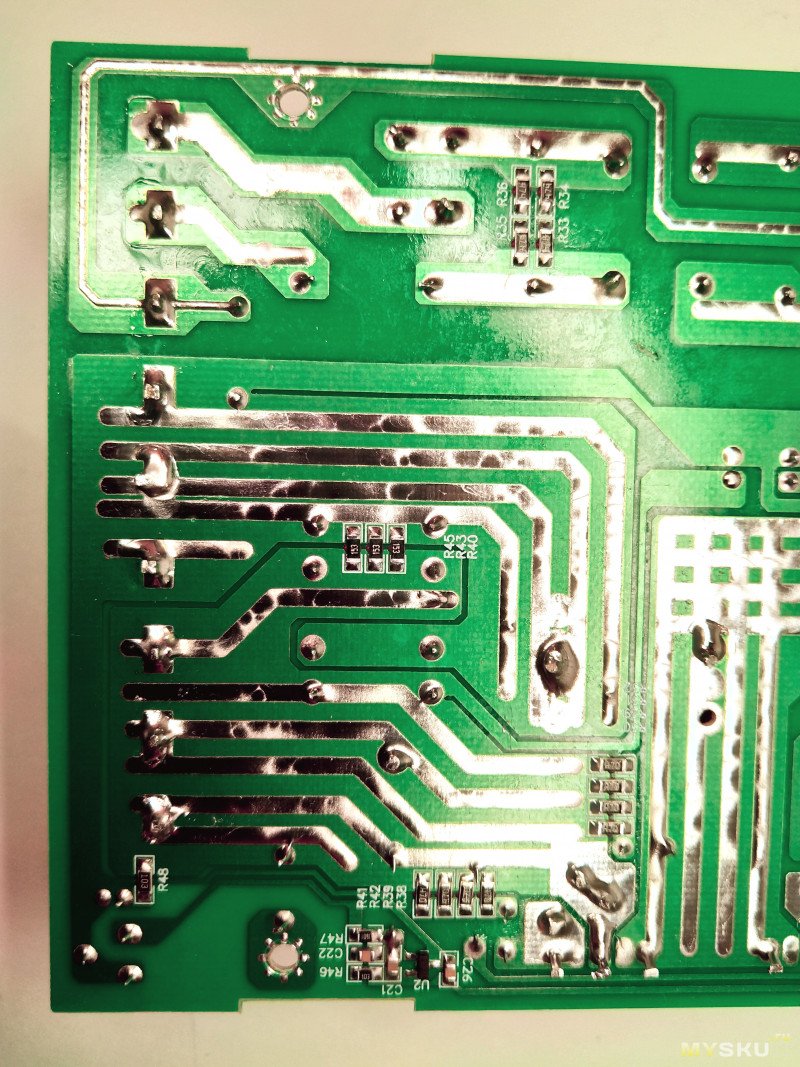
Плата односторонняя, но маска с двух сторон. Неотмытый флюс также с обеих сторон платы. Есть Y2 конденсатор между обмотками трансформатора. На выходе, между +48 В и корпусом стоит высоковольтный конденсатор 0.01 кмФ на 2 КВ.
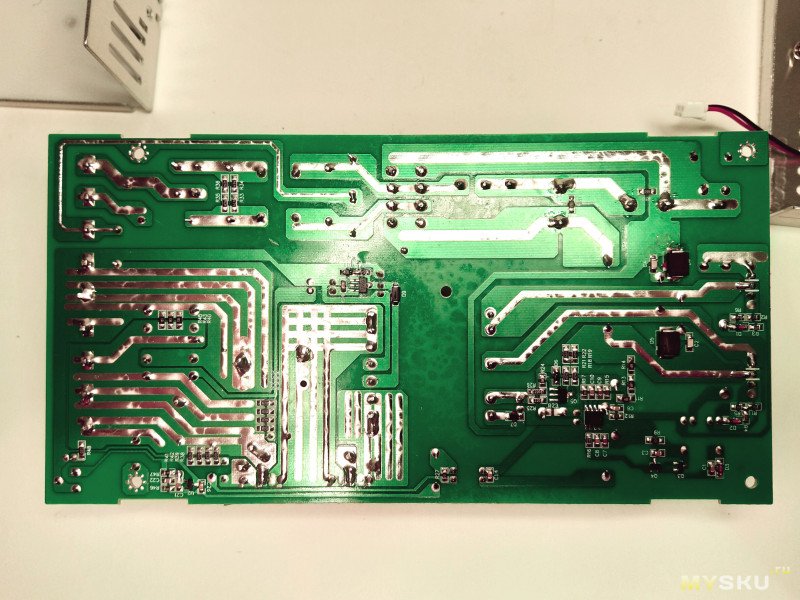
Р — ровно.
Силовые дорожки дополнительно залужены.
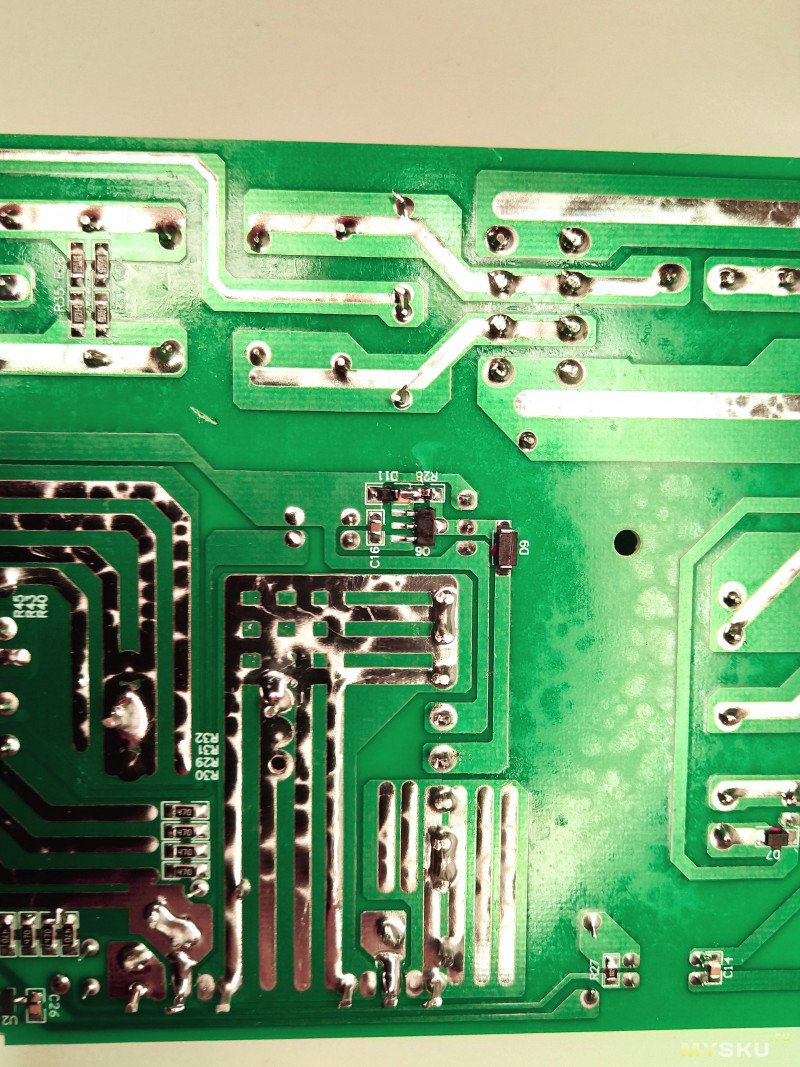
Работает все это добро на контроллере NCP1252-D производства ON Semiconductor. На них же собраны, например, Meanwell LRS-350.
Проверка
Я сказал, что мотор можно крутить без микроконтроллера и программного кода, одним энкодером. Да, это так. Собираем стенд, если можно так выразиться.
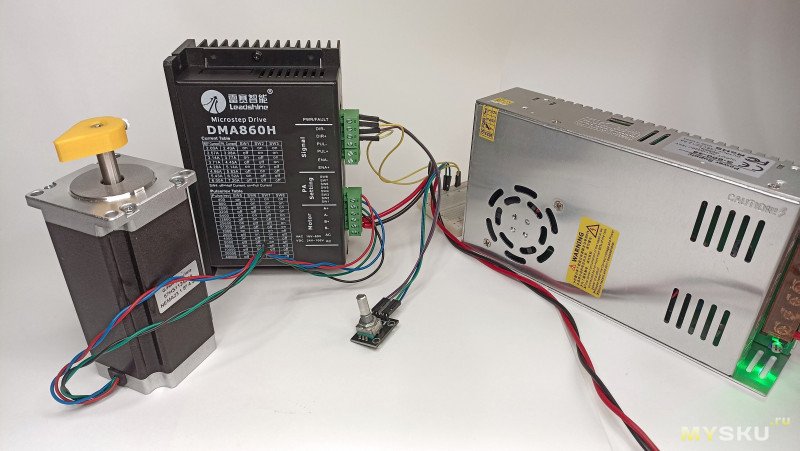
Изобразим схему подключений в Fritzing:
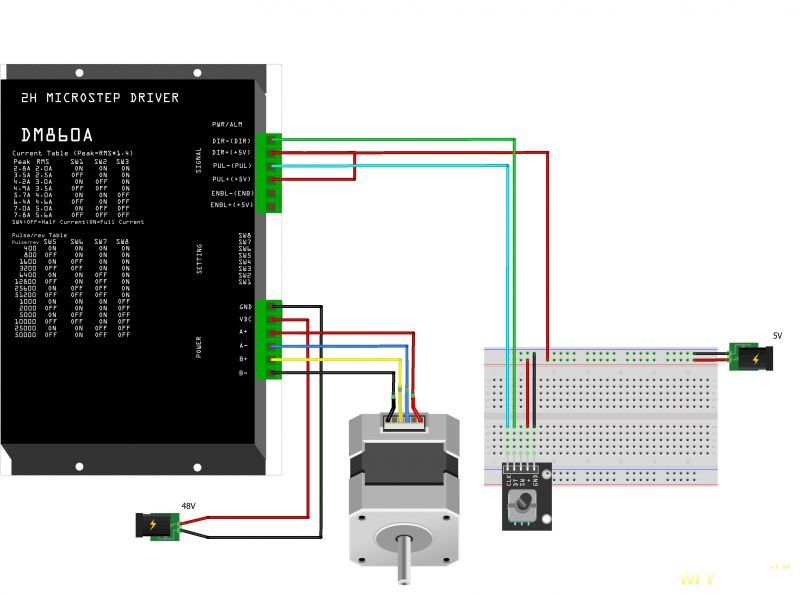
Все подключения и смена режимов драйвера выполняются со снятым напряжением!
Интерфейс STEP/DIR является самым распространенным стандартом управления шаговыми двигателями. Для связи с контроллером используются три управляющих сигнала:
- STEP (он же PULSE) — шаг/импульс, за один импульс ротор двигателя поворачивается на один шаг (микрошаг).
- DIR — выбор направления вращения, логический 0 — в одну сторону, 1 — в другую. Смена состояния DIR осуществляется только при отсутствии импульсов на STEP.
- ENABLE — сигнал разрешения работы. Обмотки двигателя можно электрически отключить и вал двигателя не будет удерживаться.
ENABLE для данного драйвера можно не подключать. Шаг и направление мы будем брать с энкодера, он для этого подходит идеально:
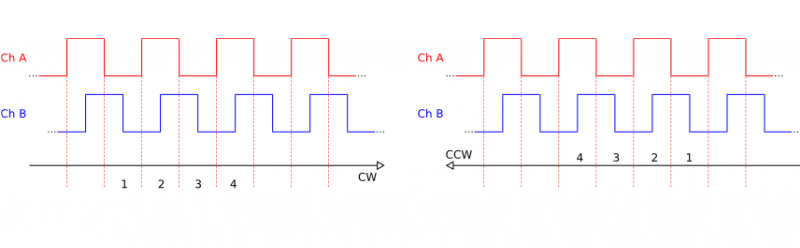
Сигнал с одного выхода энкодера будет задавать шаг двигателя (один щелчок энкодера — один шаг мотора), второй выход энкодера задаст направление вращения.
А что если ничего не происходит? Нужно выставить на драйвере поменьше шагов на оборот.
Без заключения

| +157 |
12308
189
|
| +38 |
1897
65
|
| +58 |
4713
135
|
| +49 |
2127
42
|
На мой взгляд — не очевидно. Статор не магнитится. Намагниченные подшипники? Меня интересовал подобный вопрос, изучал русскоязычную и западную литературу. Кроме холиваров на форумах и сомнительных видео никаких подтверждений не нашел.
убрать ---.
Цитата
I had a motor I didn't care for (MO62-FD04), so I ran dyno tests on it that showed 112 in-oz low-speed torque. I removed the rotor for 5 seconds, then replaced it and re-ran the dyno test.
The low-speed torque now was 70 in-oz, or only 62% of what it was before disassemby.
You may not notice the loss in torque but it is real and it is there.
«Щелчки» в положениях ощущаются отчетливо, если коротнуть обмотки, за вал не повернуть.
Ниже:
По рекомендациям производителя как обычно: ремонт и ТО производится только квалифицированным персоналом, обычные смертные в оборудование лезть не должны.
Нужно собирать стенд. Предложения?
Мне импонирует человек, который обмерил и привел цифры и есть другой человек, который говорит: «поверьте мне» но без цифр.
Армянские движки с опилками стояли в термопринтерах, где тоже смазка с опилками была, давно это было в 80х. И движок тупо не крутился.
В таком случае движку быстро приходит полярный лис. Даже если он будет крутиться, не стоит удивляться, что сопротивление на обмотках будет разниться, и параметры будут отличаться от исходных
Сборка-разборка в домашних условиях стандартного шаговика может добавить вам гемороя в плане: а) неравномерности магнитного поля при работе и как следствие неравномерного момента, б) трением ротора об статор в определенных местах и их износа, как следствие металическая пыль и стружка внутри. Хотя при наличии 3D принтера можно попробовать напечатать оправку для сборки, чтоб хоть как-то выставить соосность.
По описанному устройству мотора согласен полностью.
И порой быстрее какую-нибудь загогулину вручную выточить, чем в 3D чертить.
Главное пока что, отладить механику, заставить все это шевелиться, а другие мозги можно и потом вставить.
Это вряд ли. Скорее всего переобутые в новую рубашку б/у конденсаторы с разбора, либо просто китайские конденсаторы.
По переключателю 110/230V — его можно/нужно совсем убрать. Он там не нужен и он в неактивированном состоянии при 230V. Освободится место. По диодному мосту — можно поставить свой диодный мост с нормальным радиатором.
По транзисторам — снова можно поставить транзисторы в большом корпусе, типа IRFP460.
По накопительному дросселю — по пайке вроде там медь, но лучше перепроверить. На старых недорогих БП на TL494, почти всегда, был намотан алюминий.
По диодным сборкам — нужно там проверять резисторы и конденсаторы в обвязке (температура). Были ошибки.
По конденсаторам на выходе — эти БП позволяют ставить простые серии конденсаторов на выход. Достаточно поставить недорогую серию Samwha RD или даже JAMICON TK. В России они легко доступны.
У меня стратегический запас радиаторов из старых материнок, ATX, несколько серверных БП на запчасти, оттуда же дроссели и пригоршня живых ключей и диодов.
БП взял для опытов, в долговременной перспективе его скорее всего заменю. Чем его доделывать не лучше ли взять примерно за те же деньги БУ MeanWell? Дольше прослужит.
Т.е такого плана щиты имею в виду
Т.е такого плана
UPD.: а, это же Totka…
Я с доставкой считаю конечно. Вполне можно купить моторчик среднего качества.
Влезет на 4.5кВт с возможностью влить кратковременно и 17-18кВт (ну, это для глиссера лодки только актуально или если на электротележку поставили, то с цепями на колесах по грязи стартануть):
nd72490 330А (490A кратковременно) около действительно в 200 баксов, но можно сэкономить и взять 72350 в 2 раза дешевле или 72470s уже за 120-125:
Обороты регулировать легко, платы копеечные, контроллеры сразу поддерживают и дисплеи, и удаленное управление.
Так-то есть широкие и короткие моторы, которые с хорошим редуктором как-то можно в теории вместо серв использовать. А положение определять другими способами, т.к. с такой намоткой в движке это невозможно сделать родными средствами. Чисто ради цены за 1Вт/1$ пусковой мощности, т.к. все эти китай-моторы легко проглотят многократную кратковременную перегрузку хоть в постоянном режиме.
снегуроTotka, и расспросим!А перескочил бы вместо него сразу на Nema 34 (диагональ 86мм) и самый короткий по длине. Первый попавшийся, (пальцем в небо) — ШД 86HS78-4004 с индуктивностю 2,5 мГн и моментом удержания (реальным!) 35,7 кгc*см. Вот этот ШД будет бегать шустро.
P.S. при этом оба эти движка на 4А.
Да и про тормаз забыли
Если к ним прикрутить энкодер, то получится сервомотор с очень посредственными характеристиками, если к нему прикрутить качественный энкодер, электромагнитный тормаз то получится сервомотор с характеристиками близкими к заводским экземплярам, но по стоимости это выйдет дороже готового
в итоге дешевле купить нормальный сервак чем заниматься мазохизмом изобретая велосипед, для ЧПУ такое точно не пригодно.
Я обычно из принтеров добывал движки чуть больше nema14.
На твоем пишет что страница хоста не найдена
Простой коллекторный двигатель с редуктором хотя бы не требует драйвера для управления (штука тоже не дешевая). Или даже с червячным редуктором. Если хочется шаговый, то nema17 с червячным редуктором, и сразу с ESP32 в качестве контроллера и управлением по WiFi )